-
产品

-
应用
-
支持
-
关于AKM
高灵敏度霍尔元件
#06 磁传感器基础知识
高灵敏度霍尔元件 砷化铟 (InAs)
在霍尔元件的种类和原理中, 我们介绍了三种霍尔元件:超高灵敏度霍尔元件, 高灵敏度霍尔元件和低漂移霍尔元件。
此章节中将介绍高灵敏度霍尔元件的应用例。
半导体材料
(AKM产品名称)
砷化铟:InAs
(HQ系列) * 产品中含有Ga、Sb等元素。
特征
在3种霍尔元件中,InAs较低漂移霍尔元件GaAs输出电压更大,较超高灵敏度霍尔元件InSb的温度特性更为稳定 (参考 霍尔元件的种类和原理) 。使用定电压方式驱动能使温度特性更为稳定。
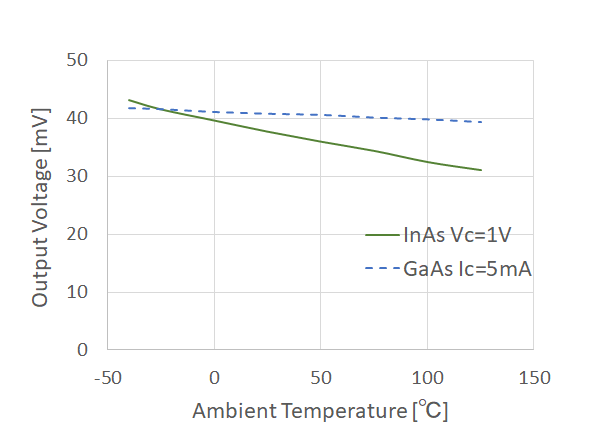 图1. 砷化铟 (InAs) 霍尔元件的温度特性 (B=50mT)
图1. 砷化铟 (InAs) 霍尔元件的温度特性 (B=50mT)
代表应用例
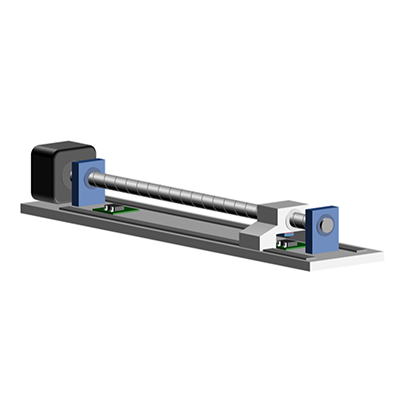
(1) 编码器
编码器是指通过检测出进行旋转运动或直线运动的物体的位置变化量、将位置信息以电信号的形式输出的装置。
旋转 (检测旋转) 编码器称为旋转编码器, 而线性 (检测线性位移) 编码器称为线性编码器。
编码器常用于工业机器人关节,工厂生产用器械等需要精密的动作/位置控制的设备。
磁性编码器通过霍尔元件检测出安装在检测对象上的磁铁的运动状况。
下图展示了磁性旋转编码器 (检测旋转角度的编码器) 的检测原理
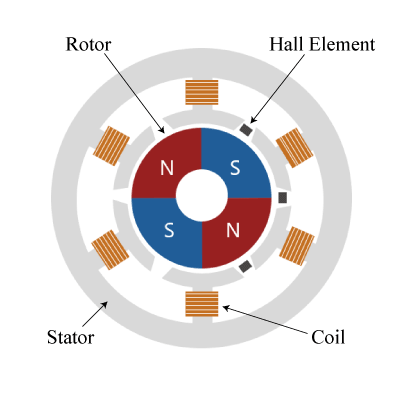
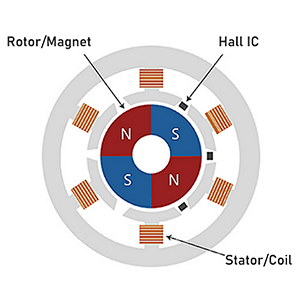
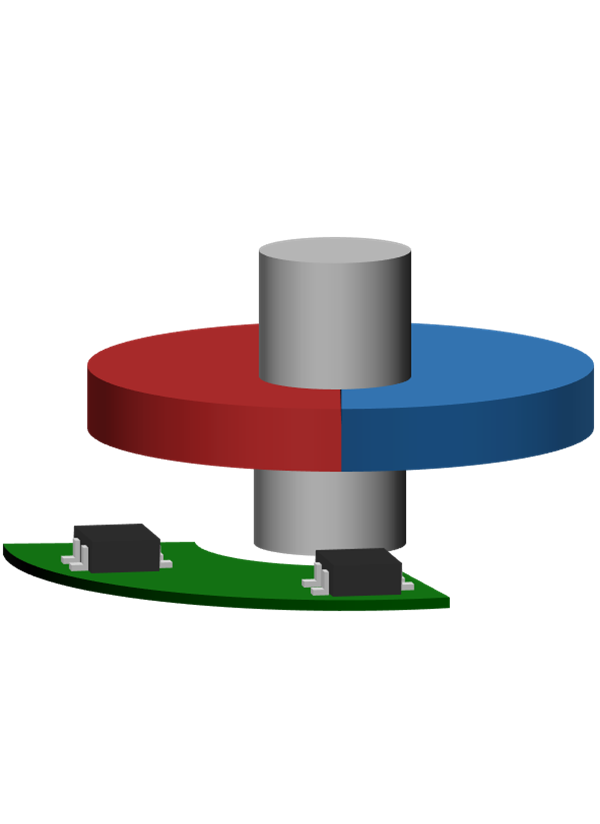 图2a. 使用了霍尔元件的旋转编码器的结构图
图2a. 使用了霍尔元件的旋转编码器的结构图
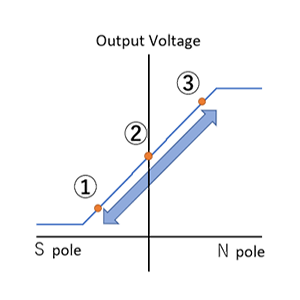
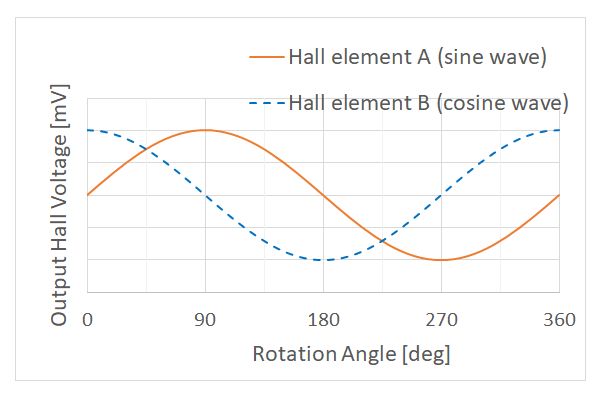 图2b. 使用了霍尔元件的旋转编码器的输出电压波形
图2b. 使用了霍尔元件的旋转编码器的输出电压波形
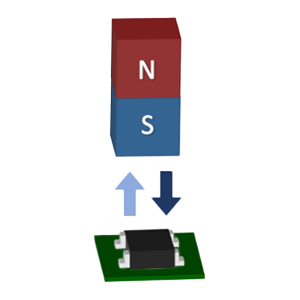
磁性编码器主要由圆形 (圆柱形或圆环形) 径向磁铁和两个霍尔元件构成。
如图2a所示,在360度旋转的磁铁下方,相隔90度的位置上设置了两个霍尔元件。
磁铁旋转时,霍尔元件会产生如图2b所示的sin波和cos波的输出电压。
磁铁的旋转角度θ可利用tanθ=sinθ/cosθ的算式,通过两个霍尔元件的输出电压来计算出反正切值 (此计算包含除法计算,还可消除磁铁和传感器的温度特性的影响) 。
尽管光学式编码器是典型的检测旋转角度用旋转编码器,然而磁性编码器相对光学式而言,更不受油污等附着物的影响,具有较高的耐环境性。
(2) 数码相机的自动对焦系统
相机的自动对焦系统有多种方式,这次我们将介绍图3所示的主动型AF系统。
主动型AF系统是通过测量相机到被摄对象的距离 (L1) ,并基于此距离和镜头的焦点来计算出能在图像传感器上成像的位置 (L2) ,并驱动镜头使之对焦。
※1 相机到被摄对象的距离 (L1) 是通过使用红外线传感器检测红外线的反射而测出的。
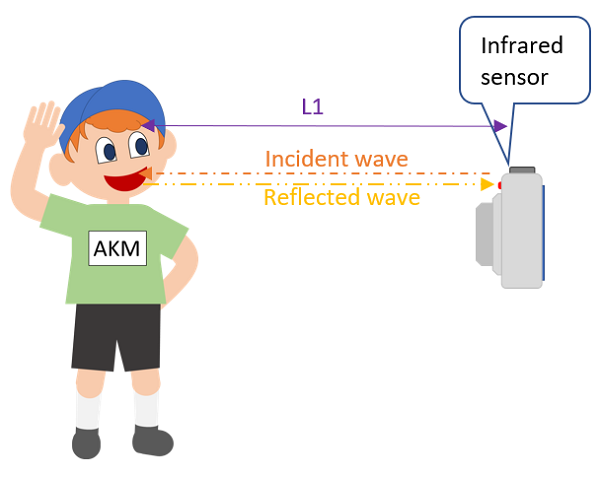 图3a. 主动型AF系统的测距方法
图3a. 主动型AF系统的测距方法
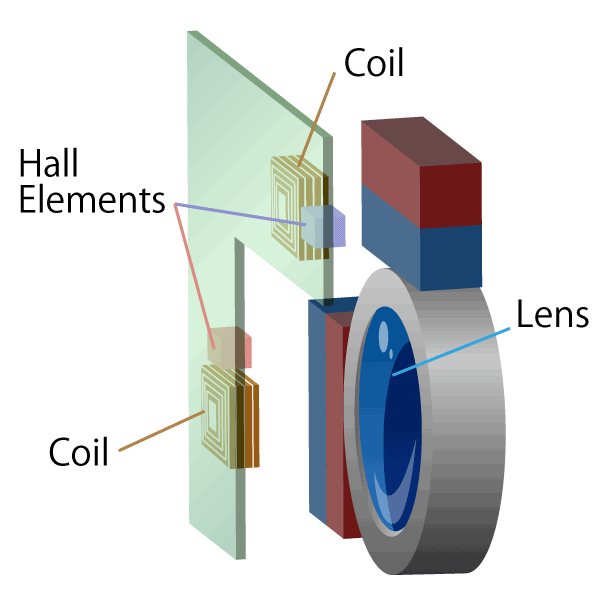
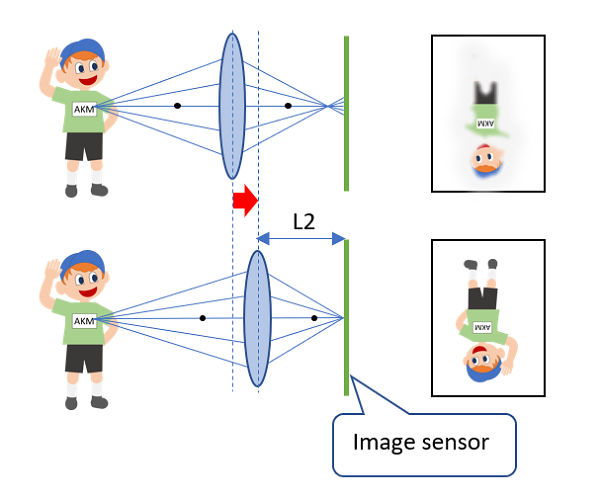 图3b. 驱动镜头在图像传感器上成像的方法
图3b. 驱动镜头在图像传感器上成像的方法
主动型AF主要由测距传感器 (如红外线传感器等) ,磁铁,霍尔元件,镜头,图像传感器(如CMOS传感器等)构成。
驱动镜头使被摄对象在图像传感器上成像时,利用霍尔元件检测出镜头的移动距离。
驱动数码相机的镜头时,额定行程约数mm的程度。移动距离的检测方式我们在「低漂移霍尔元件」一节中也曾介绍过,然而这种方式仅适用于额定行程在1mm程度的情况,并不适用于移动距离在1mm以上的数码相机。
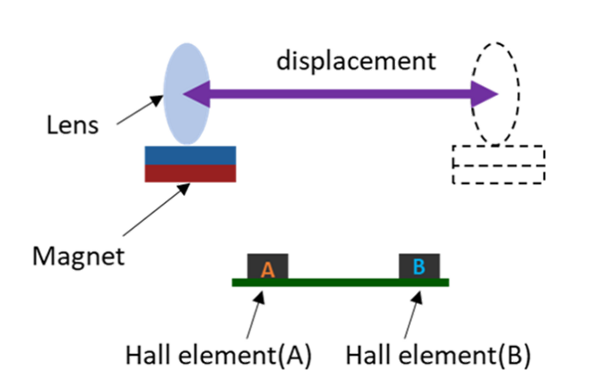
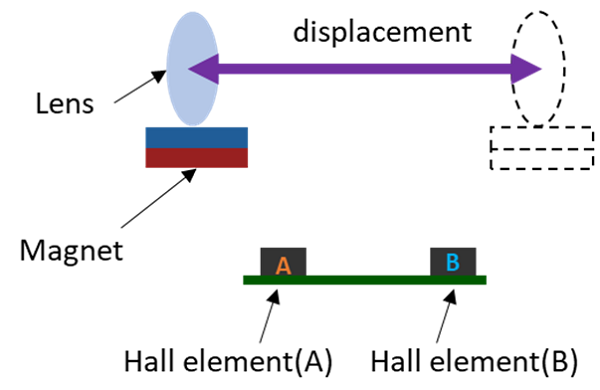 图4. 使用两个霍尔元件进行位置检测的结构图
图4. 使用两个霍尔元件进行位置检测的结构图
因此,如下图所示,可通过使用A和B两个霍尔元件来延长检测距离。具体的检测方法是,将磁铁设置在磁极面向霍尔元件的方向,并计算两个霍尔元件的磁通密度差 (BA-BB) (此外,检测位移量时,两霍尔元件的磁通密度差 (BA-BB) 等价于输出电压差 (VoutA-VoutB) ) 。
通过使用这种方式,可在较高精度下检测到3mm以内的位移量 (磁铁的位移量∝两霍尔元件的磁通密度差 (BA-BB) ∝ 两霍尔元件的输出电压差 (VoutA-VoutB) ) 。
此外,通过进行差 (VoutA-VoutB) ÷ 和 (VoutA+VoutB) 的计算,磁铁和霍尔元件的温度特性的影响得以抵消,可以更为准确地检测出镜头的位置。
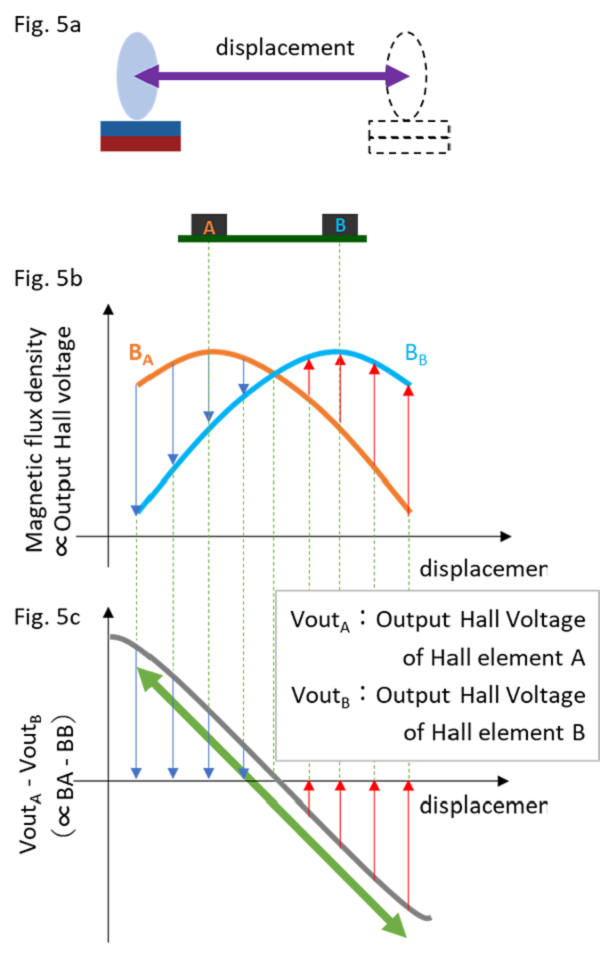
图5a. 使用两个霍尔元件进行位置检测的结构图
图5b. 两个霍尔元件施加的磁通密度
图5c. 两个霍尔元件的输出电压差
为何上述应用例中使用了砷化铟 (InAs) 霍尔元件呢?
在高精度检测短距离 (1/1000的精度检测1mm以下距离) 的情况下,1个霍尔元件就可以检测出来,因此使用温度特性更为良好的GaAs霍尔元件来确保高精度 (如图6a) 。
然而,在测量更长距离 (1/1000的精度检测1mm~3mm距离) 时,通过使用多个霍尔元件并利用上述差÷和的计算,可以延长检测距离。这个演算方式还可以消除温度特性的影响,所以使用比GaAs霍尔元件具有更佳的S/N比的InAs霍尔元件时,能获得更高的精度 (如图6b) 。
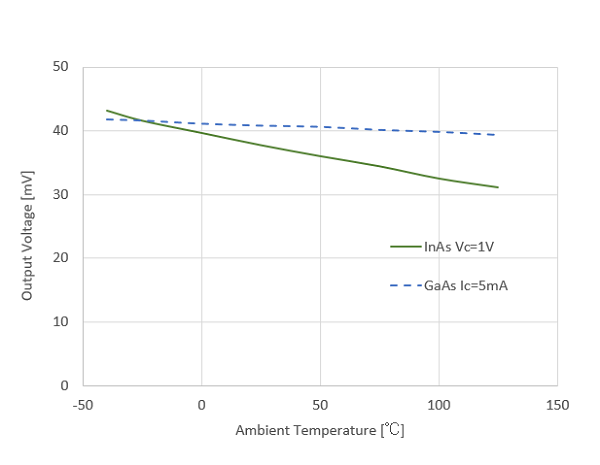 图6a. InAs霍尔元件和GaAs霍尔元件的输出电压的温度特性 (B=50mT)
图6a. InAs霍尔元件和GaAs霍尔元件的输出电压的温度特性 (B=50mT)
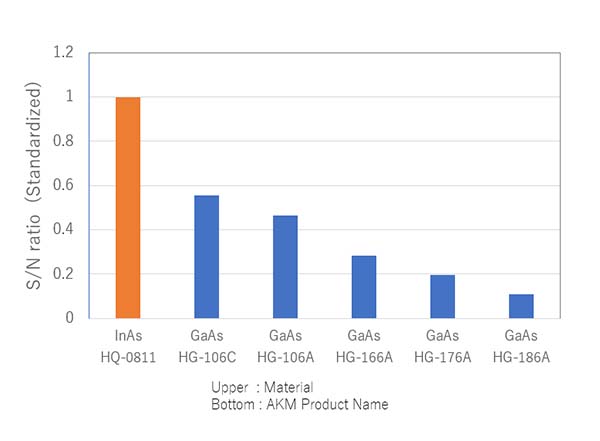 图6b. InAs霍尔元件和GaAs霍尔元件的S/N ※InAs霍尔元件视为参考值1
图6b. InAs霍尔元件和GaAs霍尔元件的S/N ※InAs霍尔元件视为参考值1
为什么选择AKM?
即使是这样的产品,也是AKM霍尔传感器的用武之地! 空调、洗衣机、智能手机等大家身边常用产品使用的霍尔传感器。下面介绍众多客户选择AKM霍尔传感器的理由。
 霍尔传感器
霍尔传感器