-
製品情報

-
アプリケーション
-
サポート
-
AKM について
高感度ホール素子
#06 磁気センサー 基礎知識
高感度ホール素子 インジウムヒ素 (InAs)
ホール素子の原理と種類では、3 種類のホール素子 (超高感度ホール素子、高感度ホール素子、低ドリフトホール素子) を紹介しました。
このページでは、高感度ホール素子のアプリケーション例について説明します。
半導体材料
(AKM 製品名)
インジウムヒ素 : InAs
(HQ シリーズ*) *材料中に Ga, Sb 等も含みます。
特徴
3 つのホール素子の中で、低ドリフトホール素子 (GaAs) よりも出力電圧が大きく、超高感度ホール素子 (InSb) よりも温度特性が安定したホール素子です (「ホール素子の原理と種類」参照)。定電圧駆動させることでより温度特性が安定します。
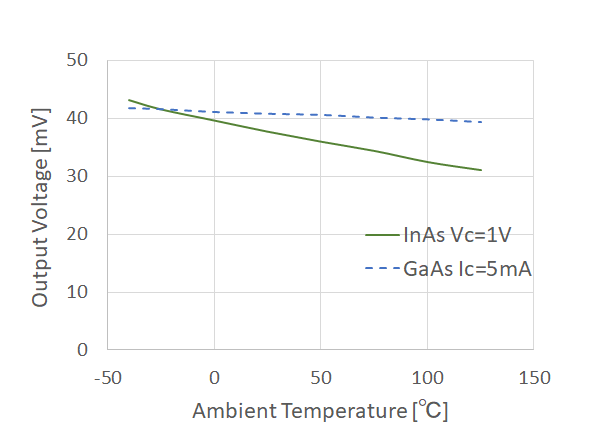 図 1. インジウムヒ素 (InAs) ホール素子の温度特性
図 1. インジウムヒ素 (InAs) ホール素子の温度特性
代表的なアプリケーション
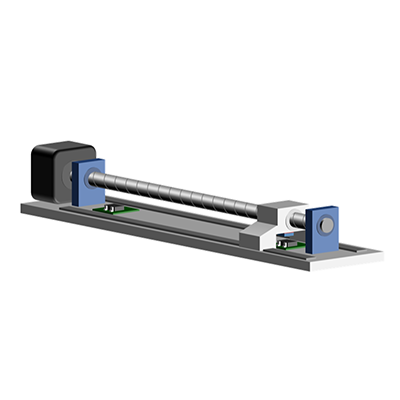
(1) エンコーダー
エンコーダーとは、回転や直線運動をする物体の位置の変化を検出して、位置情報を電気信号として出力する装置です。
回転型の (回転を検知する) エンコーダーはロータリーエンコーダーといい、直線型の (直線変位を検知する) エンコーダーをリニアエンコーダーといいます。
ロボット関節や産業工作機械など、精密に動作・位置制御する用途に採用されています。
磁気式エンコーダーでは、動きを検出したい対象物に磁石を取り付け、その動きをホール素子で検出します。
以下に、磁気式のロータリーエンコーダー (回転や角度を検出するエンコーダー) の検出原理を示します。
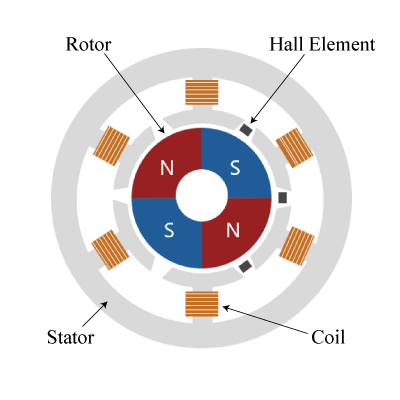
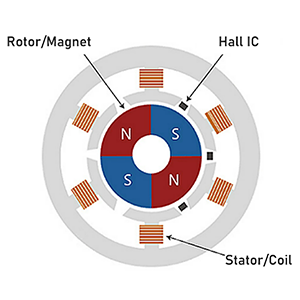
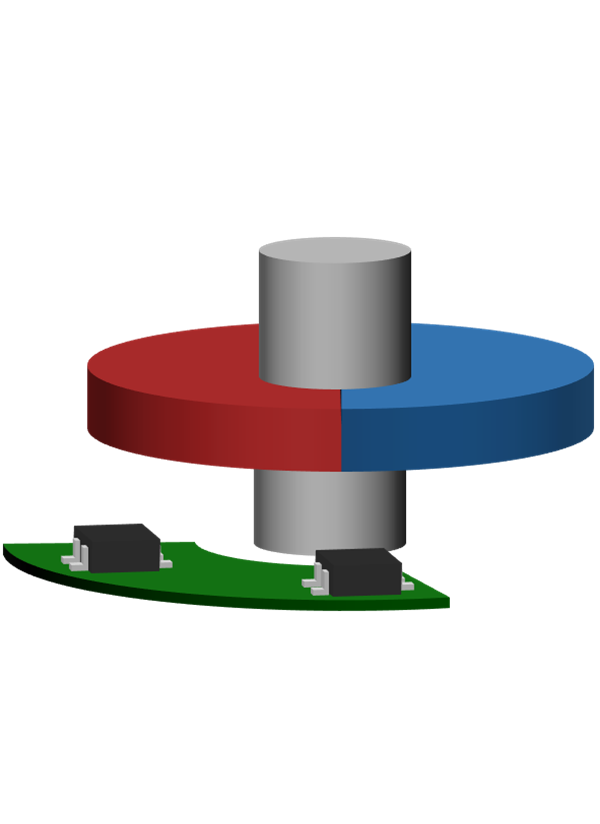 図 2a. ホール素子を使ったロータリーエンコーダーの構成図
図 2a. ホール素子を使ったロータリーエンコーダーの構成図
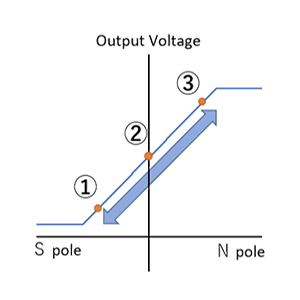
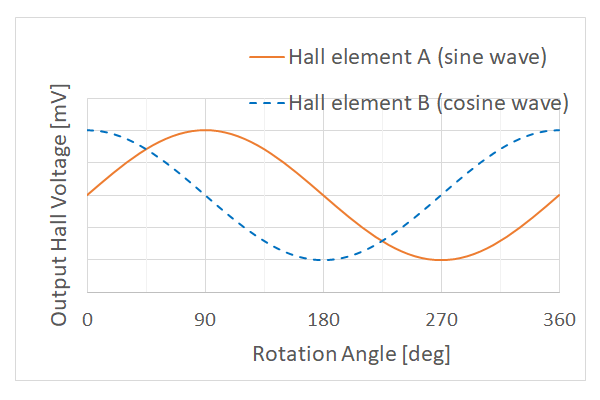 図 2b. ホール素子を使ったロータリーエンコーダーの出力波形
図 2b. ホール素子を使ったロータリーエンコーダーの出力波形
磁気式エンコーダーの主要部材は、円形 (円柱 or ドーナツ型) の径方向着磁の磁石と 2 つのホール素子です。
図 2a のように 360 度回転する磁石に対して 90 度の位置に 2 つのホール素子を配置します。
この磁石が回転すると、 2 つのホール素子からは図 2b のような sin 波、cos 波の出力電圧が発生します。
磁石の回転角度 θ は、tanθ=sinθ / cosθ の式より、2 つのホール素子の出力電圧からアークタンジェントを計算することで算出可能です。(この計算は割り算が含まれるため、磁石とセンサーの両方の温度特性の影響を打ち消すこともできます。)
ロータリーエンコーダーの角度検出方式は光学式のエンコーダーが代表的ですが、磁気式のエンコーダーは光学式に比べてホコリや油など汚れが付着しても問題なく検出できるなど、耐環境性に優れていることが特長です。
(2) デジタルスチールカメラのオートフォーカス機構
カメラのオートフォーカス (AF) 機能には様々な種類があります。その中で、今回はアクティブ AF の例を図 3 に示します。
アクティブAFはカメラから被写体までの距離 (L1) を測定し※1、その距離情報とレンズの焦点距離をもとに、撮像素子上に結像出来るようにレンズの位置 (L2) を計算し、レンズを動かすことでピントを合わせます。
※1 カメラから被写体までの距離 (L1) は、赤外線センサーなどを使用し、センサーで赤外線の跳ね返りを検出することで求めます。
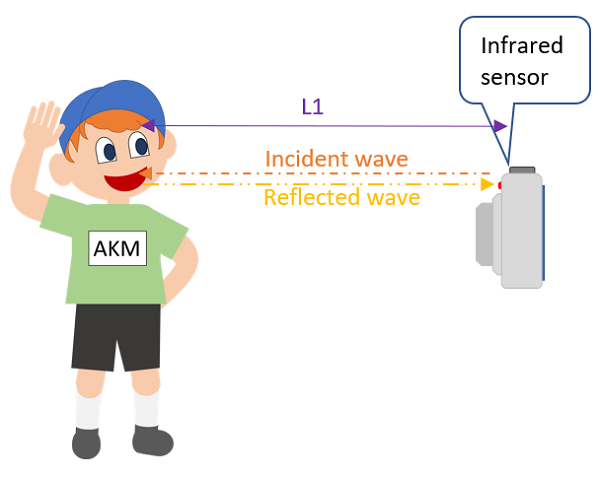 図 3a. アクティブAFでのカメラと被写体との測長方法
図 3a. アクティブAFでのカメラと被写体との測長方法
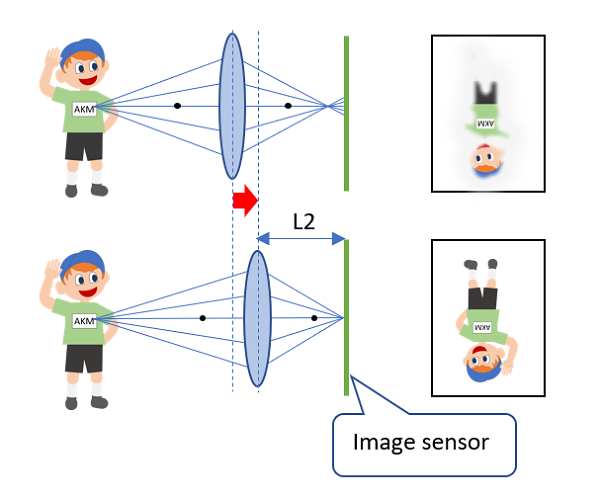 図 3b. レンズ駆動による撮像素子への結像の仕方
図 3b. レンズ駆動による撮像素子への結像の仕方
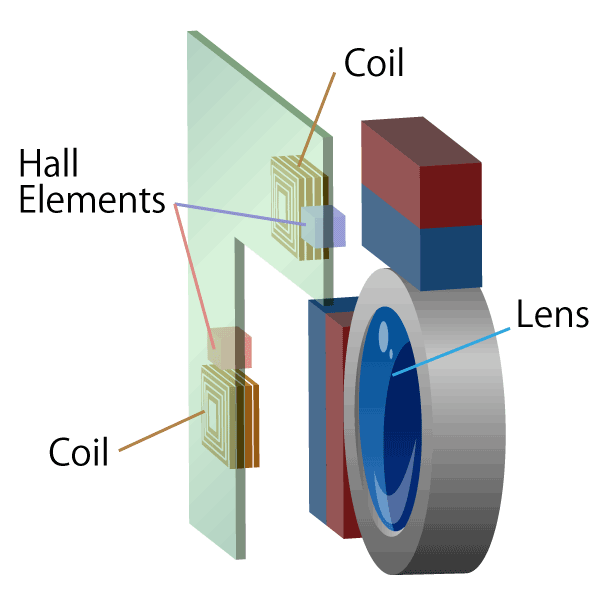
アクティブ AF の主要部材は、測距センサー (赤外線センサーなど)、磁石、ホール素子、レンズ、撮像素子 (CMOS センサーなど) です。
被写体が撮像素子上に結像するようにレンズを移動させる際、ホール素子を使ってレンズの移動量を検出します。
デジタルスチールカメラのレンズ移動の場合、移動量は数 mm 程度になります。移動量検出方法としては「低ドリフトホール素子」で説明した方法がありますが、この方法は精度よく検出できるストローク距離がおおよそ 1mm 程度であるため、レンズ移動距離が 1mm 以上のデジタルスチールカメラの測定に適しません。
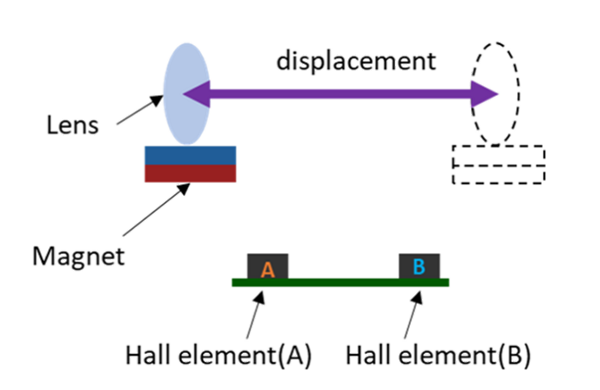
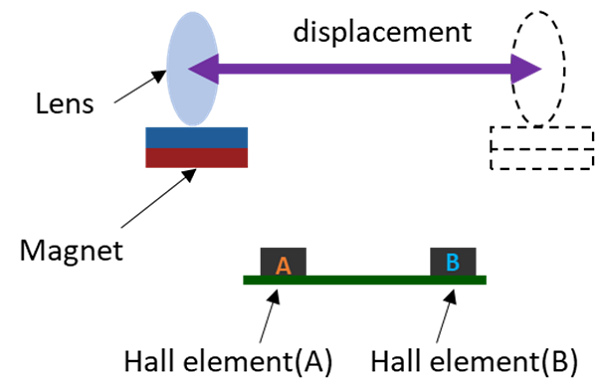 図 4. 2 つのホール素子を使った位置検出の構成図
図 4. 2 つのホール素子を使った位置検出の構成図
このため、例えば下図の様に A、B の 2 つのホール素子を使用して検出距離を伸ばす方法があります。具体的な検出方法は、ホール素子に対して磁石の極が対向する向きに磁石を配置し、それぞれのホール素子に印加される磁束密度差 (BA-BB) を演算する方法です。(また、移動量検出において、それぞれのホール素子の印加磁束密度差 (BA-BB) と出力電圧差 (VoutA-VoutB) は等価です。)
この方法により、おおよそ 3 mm までは移動量に対して精度よく出力電圧を得ることができます。(磁石の移動量 ∝ 2 つのホール素子に印加された磁束密度差 (BA-BB) ∝ 2 つのホール素子の出力電圧差 (VoutA-VoutB) )
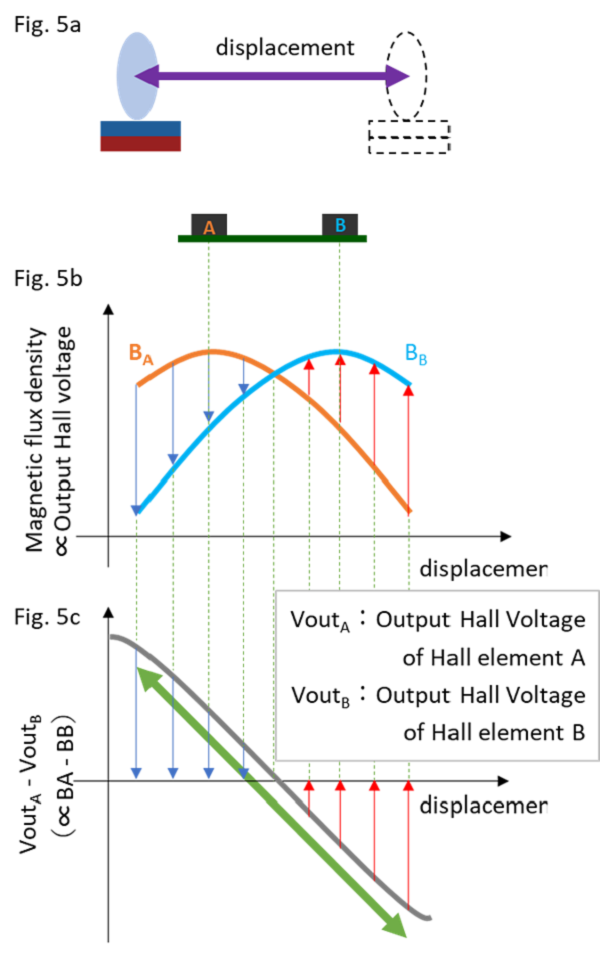
図 5a. 2 つのホール素子を使った位置検出の構成図
図 5b. 2 つのホール素子の印加磁束密度
図 5c. 2 つのホール素子の出力電圧差
◆TIPS なぜ上記のアプリケーションにインジウムヒ素 (InAs) ホール素子が使われるのか?
短距離を精度よく検出したい (1mm 以下の距離を 1 / 1000 の精度で) 場合、ホール素子 1 個で検出できるため、温度特性の良い GaAs ホール素子を使うことで精度よく検出できます。(図 6a 参照)
しかし、それより長い距離を精度よく検出したい (1mm~3mm 程度の距離を 1 / 1000 の精度で) 場合、ホール素子を複数個使って上述の差 ÷ 和の演算により検出距離を延ばします。この演算ではホール素子の温度特性の影響を排除できるため、GaAs ホール素子よりも S/N 比の良い InAs ホール素子の方が精度がよくなります。(図 6b 参照)
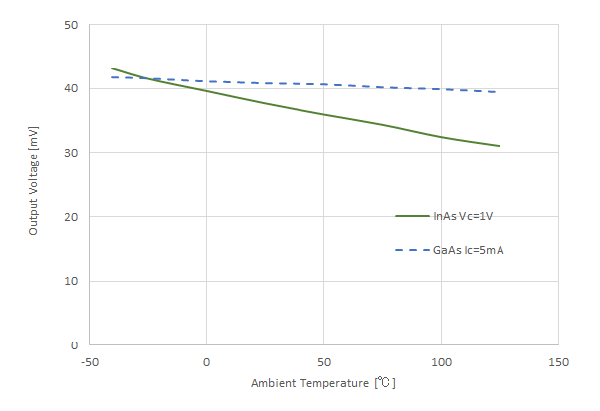 図 6a. InAs ホール素子と GaAs ホール素子の出力電圧の温度特性 (B=50mT)
図 6a. InAs ホール素子と GaAs ホール素子の出力電圧の温度特性 (B=50mT)
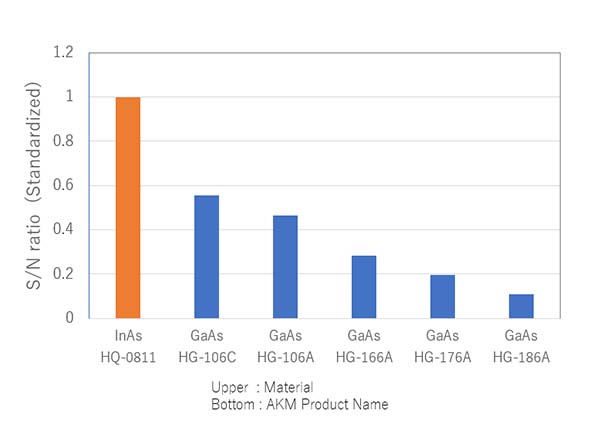 図 6b. InAs ホール素子と GaAs ホール素子の S/N ※InAs ホール素子の S/N を 1 とした場合
図 6b. InAs ホール素子と GaAs ホール素子の S/N ※InAs ホール素子の S/N を 1 とした場合
選ばれる理由
こんなところにも AKM のホールセンサーが !
エアコン・洗濯機・スマートフォン等、皆様の身近な製品にも使われているホールセンサー。
ここではなぜ AKM のホールセンサーが広く皆様に選ばれているのかを紹介します。
 ホールセンサー
ホールセンサー