-
产品

-
应用
-
支持
-
关于AKM
旋转角度传感器用语解说
旋转角度传感器
AKM 旋转角度传感器 IC 常用词语的定义
AKM 旋转角度传感器 IC的技术资料中,经常出现的专业术语的说明。
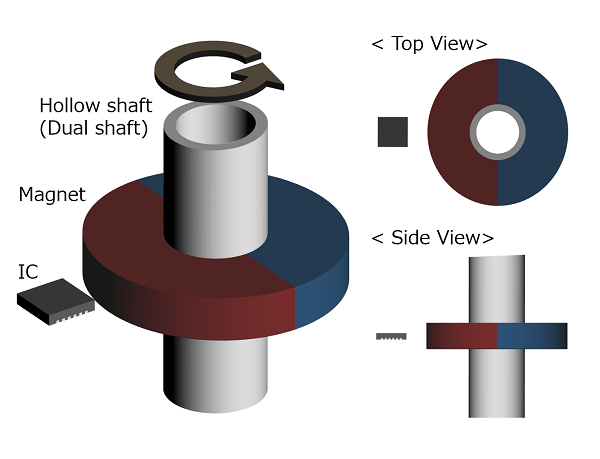
如图,Off-Axis配置是传感器不安装在旋转轴上的装配方式。因为能解放旋转轴,所以也可用在双轴电机及中空电机上。
* AK7455可支持Off-Axis配置。
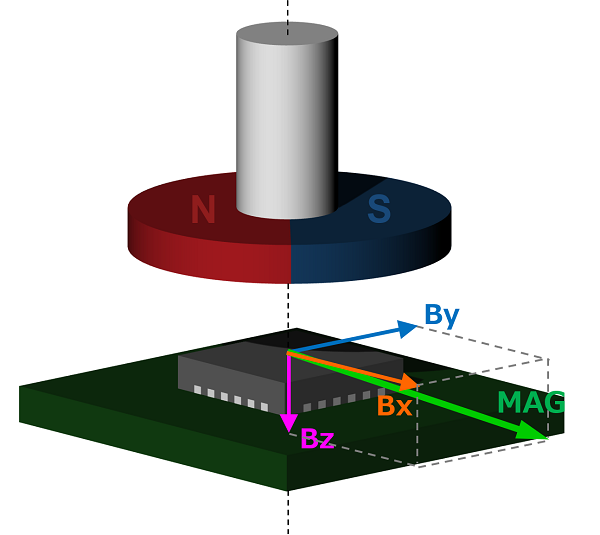
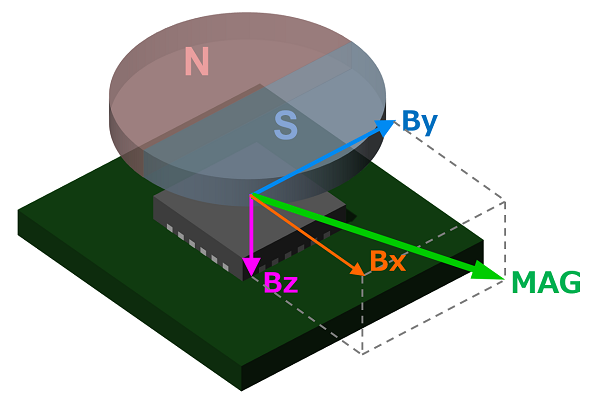
如图,磁铁中心与传感器中心与旋转轴中心呈一直线的安装方式,叫Shaft-End配置。
* Shaft-End配置下,如果没有轴偏心,Bz = 0
检测磁场的部分。也被叫做传感器。(在磁铁选型指南中,感磁面被称为“传感器”)
各产品的感磁面位置不同,标记在产品的规格书内。
 感磁面
感磁面
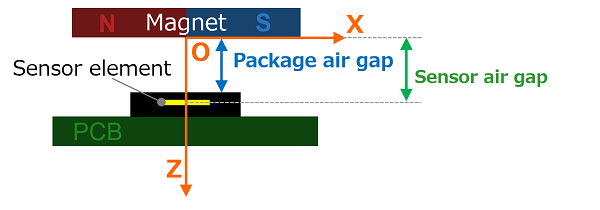
对于旋转角度传感器IC来说,从磁铁表面到传感器(感磁面)间的距离被称为“传感器空气间隙”,从磁铁表面到IC封装外壳(印字面)的距离被称为“封装空气间隙”。
各产品从IC封装表面到传感器的距离是固定的,在对产品进行说明时,有时会将“封装空气间隙”直接略称为“空气间隙”。
在旋转角度传感器AK7455的技术资料中,磁铁选型指南部分将“传感器空气间隙”定义为“空气间隙”。
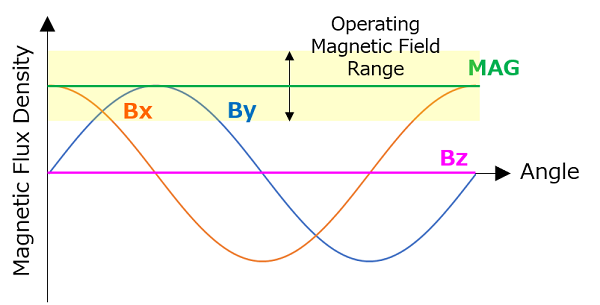
AKM旋转角度传感器AK7455检测出的磁场Bx和By。
在与IC表面封装呈水平方向的磁场(横向磁场)中,X轴方向的磁场被定义为Bx,Y轴方向的磁场被定义为By。
* Shaft-End配置下,如果没有轴偏心,Bz = 0
 磁场 (Bx,By)
磁场 (Bx,By)
MAG值的定义为:Bx与By、Bz的平方和的平方根(MAG=√(Bx^2+By^2+Bz^2))。
可检测磁场范围是指角度检测所必需的磁通密度范围,Shaft-End配置下使用AK7455时,MAG值要确保在30~70mT之间。在Shaft-End配置下,如果不存在轴偏心,MAG值为固定值。
考虑组装差异及环境温度,在不存在轴偏心的情况下,推荐将传感器安装在MAG值 50mT的位置。
 MAG值与可检测磁场范围
MAG值与可检测磁场范围
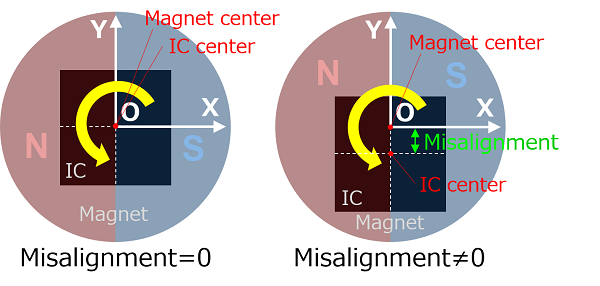
Shaft-End 配置的理想状态是,磁铁及传感器的中心与旋转轴中心呈一条直线。
AKM把传感器中心与旋转轴中心的机械偏移、偏差量叫做轴偏心、轴偏移量。
 轴偏心、轴偏移
轴偏心、轴偏移
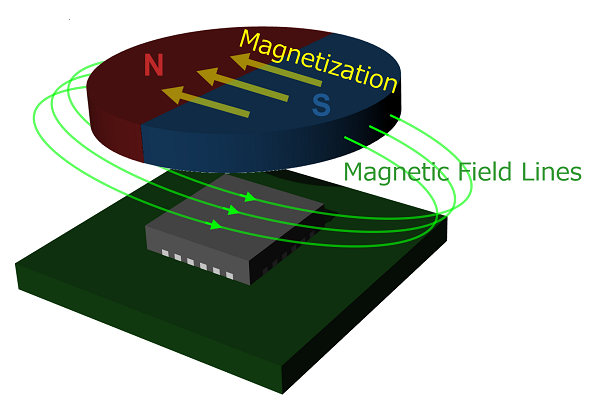
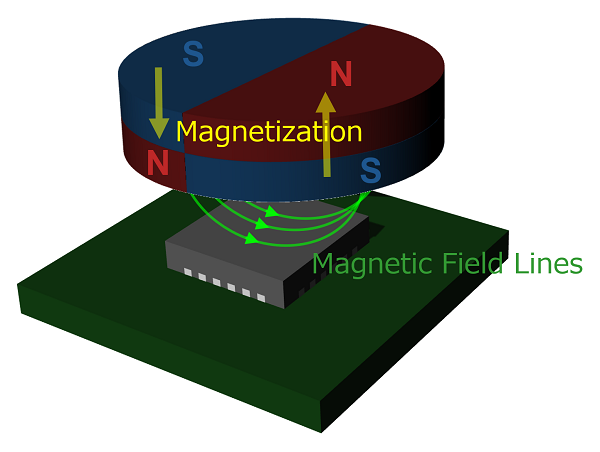
磁铁的磁化方向大致分为径向和轴向两种。
径向磁化磁铁如图所示,是沿直径方向磁化的磁铁,轴向磁化磁铁如图所示,是沿与直径相垂直的方向进行(轴方向)磁化的磁铁。
AKM用来检测施加在IC水平面上磁场(横向磁场)的旋转角度传感器IC,大多使用两极径向磁化磁铁。
 径向磁化磁铁
径向磁化磁铁
 轴向磁化磁铁
轴向磁化磁铁
烧结磁铁是指将磁性体粉末原料压制成形后,通过高温烧结形成的磁铁。
而将磁性粉末与橡胶或塑料等基础原料混合,再进行压制、抽出,制作而成的磁铁被称为粘结磁铁。粘结磁铁与烧结磁铁相比,单位体积内的磁性体粉末量少,所以磁性相对也弱。
永磁体有很多种材料,大致可分为合金类、铁氧体类、稀土钐钴类、稀土钕类。 在磁铁选型指南中,采用的是铁氧体类磁铁和钕类磁铁。
铁氧体类磁铁的优点是价格低、生产率高,钕类磁铁虽然比铁氧系磁铁贵,却是有较高剩磁通密度的高性能磁铁。
传感器是检测自然界变化的电子元器件。具有代表性的有检测位置的开关、电位计、编码器;检测温度的热敏电阻;检测光的光电二极管;检测压力的压电元件等。
传感器根据其检测的物理量分为模拟传感器和数字传感器。模拟传感器检测不间断变化的阻抗(电阻、电容、电感)、电压、电流量,而数字传感器检测如开关触点的ON/OFF状态、编码器的High/Low电压等2种数值间的变化。
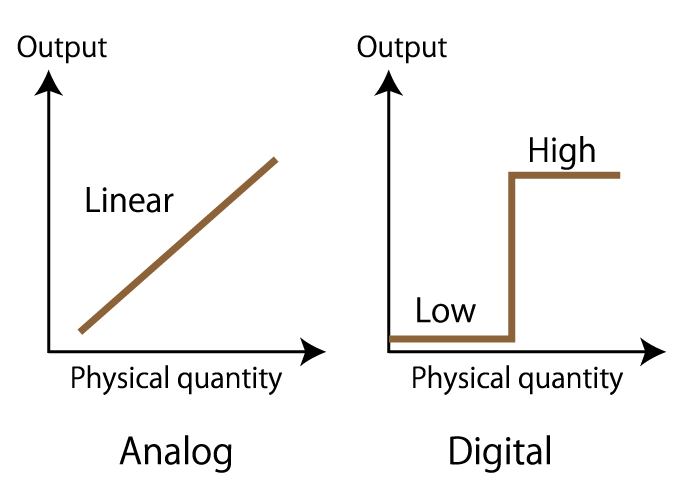 图2 模拟型和数字型
图2 模拟型和数字型
控制器根据开关或传感器的信号指令进行判断和处理,具有控制致动器动作的功能。使用电气电路和电子电路构成的控制器进行控制的方式被称为硬件控制,通过电脑程序进行控制的方式被称为软件控制。
工厂的生产设备中使用的PLC(Programmable Logic Controller:可编程逻辑控制器),包含各种电气电路和电子电路,通过改变程序可以进行各种顺序控制。
顺序控制:控制一些列动作按顺序(次序)执行。
执行器是将各种能量转化为旋转运动或直线运动等机械运动的装置。代表性的执行器有马达、滑块等。将马达、滑块等作为动力源实现旋转运动或直线运动的装置(机械)也可以被称为执行器。
执行器的动力源有,使用油和空气压力能源的液压技术、以及使用电能的电机。在旋转运动的电机中使用编码器控制速度和旋转角度,可以确保设备高精度地迅速运转。
液压也可以正确控制位置和速度,由于启动时间长,所以不使用编码器控制。
气压不对位置及速度经行精确控制,而是将简单的前进、后退动作进行组合应用,用于工厂的自动化、省力化技术。
步进电机是由安装在旋转轴上的磁铁和线圈构成的,线圈在脉冲电流流过时会被磁化,进而与旋转轴上的磁铁相互吸引并旋转。步进电机的旋转速度提高时,转矩(使电机旋转的力)会下降,导致电机跟不上脉冲速度,这种现象叫做失步。另外,在电机不该旋转时,由于不明原因导致马达意外旋转的现象也被称为失步。