-
产品

-
应用
-
支持
-
关于AKM
#03
增量方法和绝对方法
编码器基础知识
是旭化成电子株式会社 (AKM) 的编码器的技术解说系列的第3讲。旋转编码器包括增量方案、其代表相对角度、以及绝对方案 (其代表绝对角度)。本集团会透过光学编码器简明地讨论其原理、架构、优势及缺点。
概述
- 编码器表现旋转和角度信息的方法有相对角度和绝对角度2种。
- 相对角度的呈现方法包括增量方法, 绝对角度的呈现方法包括绝对方法及伪绝对方法。
- 由于相对角度及绝对角度均有好处及缺点, 故按「检测目的」分开使用。
3-1. 旋转及角度资料以何种电信号表示?
 图 1 将旋转运动转换为旋转资料的过程
图 1 将旋转运动转换为旋转资料的过程
第2讲, 说明了旋转和角度的信息大致分为4种。编码器表现角度信息的方法有相对角度和绝对角度2种, 根据各自的表现方法从编码器输出的电信号的形式不同。
- 相对角度:移动前后的角度?
- 绝对角度:自原点起现时位于多少位置?
增量方法, 代表相对角度
检测从一个位置至下一个位置的移动量的编码器类型称为相对角度检测类型。作为地图的例子, 相对角度检测类型如下:「沿此路线前进100米, 向右前进30米, 有便利店」。相对角度检测类型的编码器根据旋转运动输出数字脉冲信号。该等输出方式称为增量方法。
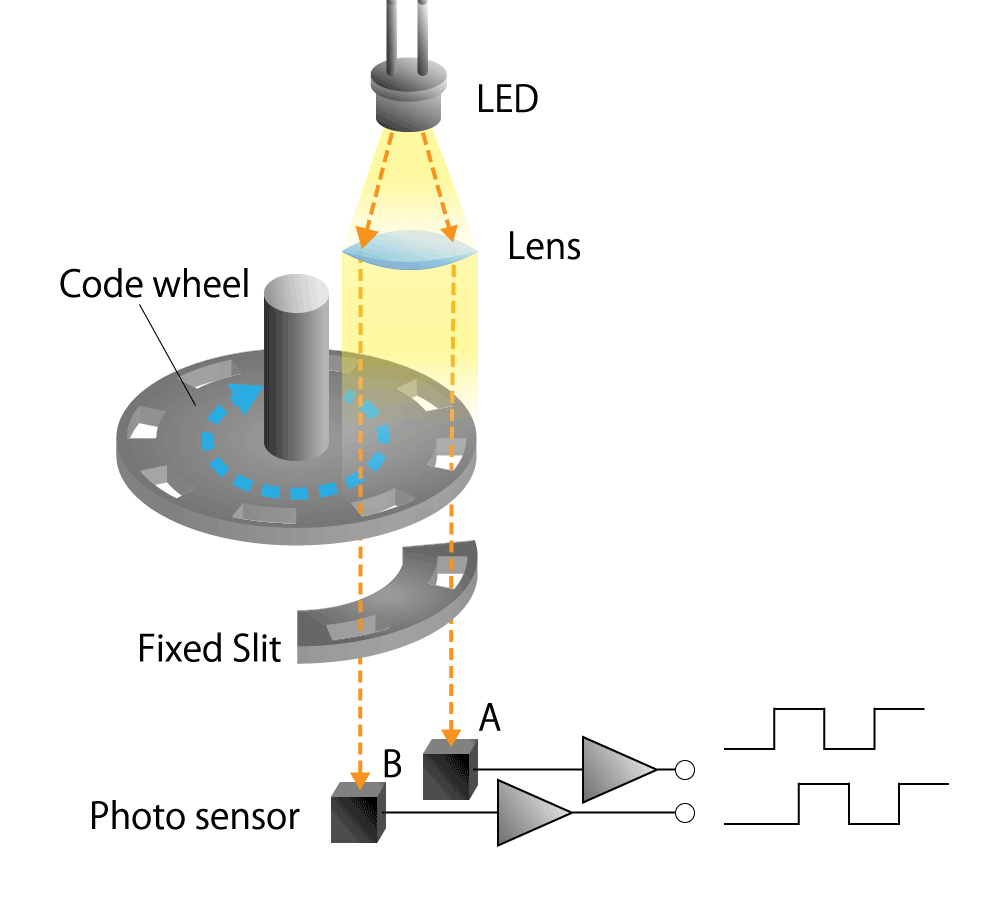
以第2讲, 中提到的光学式编码器为例进行说明。光学编码器通过旋转带有径向狭缝 (钻孔) 的圆盘产生脉冲。
计算脉冲数目时, 可知盘角度变动 (移动量)。4个狭缝排列成1列的情况下, 每1个旋转的脉冲数为4个, 所以可以知道一个脉冲的360°/4=90°旋转。将狭缝的数量增加到2倍的话, 一个脉冲就会以360°/8=45°旋转。狭缝数目 (即每周脉冲数目) 越多, 角度变化的分辨率越高, 从而可以更精细地表达移动量。
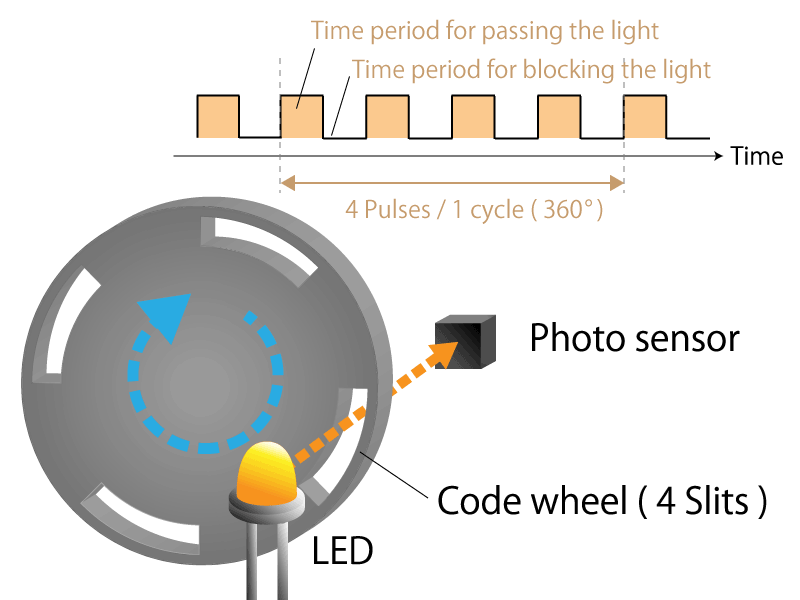 图 2a 4狭缝增量旋转编码器
图 2a 4狭缝增量旋转编码器
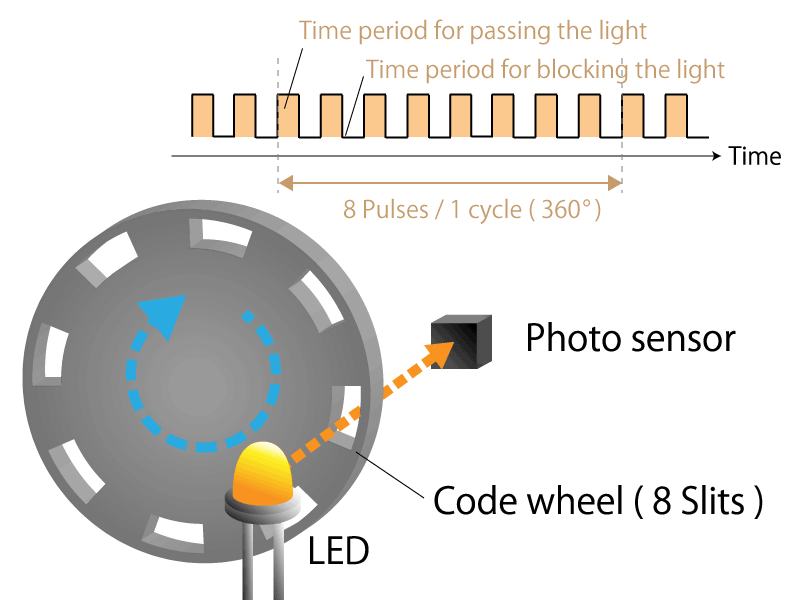 图 2b 8狭缝增量旋转编码器
图 2b 8狭缝增量旋转编码器
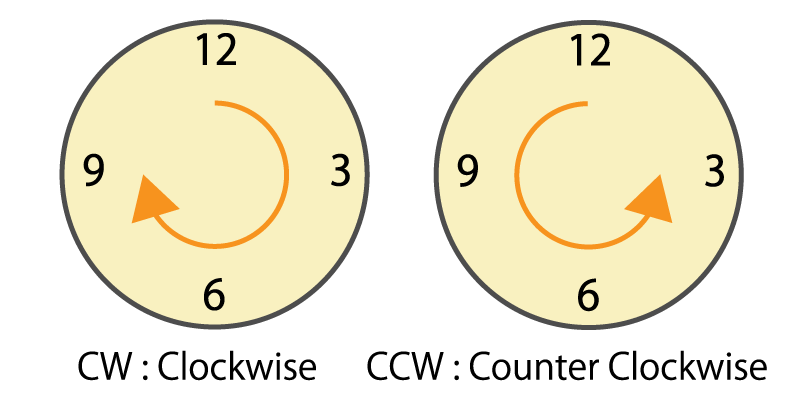
然而, 该方法不能确认旋转方向改变。因此, 会产生只有4分之1周期位相偏移的2个脉冲。这2个脉冲一般称为A相、B相。旋转方向取决于A相及B相脉冲是否上升。通过减去反转时的脉冲数, 即使旋转方向发生变化, 旋转量亦会准确知悉。
 图 3a A阶段及 B阶段的顺时针波形
图 3a A阶段及 B阶段的顺时针波形
 图 3b A阶段及 B阶段的逆时针波形
图 3b A阶段及 B阶段的逆时针波形
绝对方法, 代表绝对角度
检测 「离开原点多远」 的编码器类型称为绝对角度检测类型。若以地图为例, 则绝对角度检测类型为 「在东京都千代田区○○街○号有便利店」。绝对角度检测类型的编码器根据来自微机的命令, 以数字串行代码或模拟电压输出现时的绝对角度。有关输出方法被称为, 绝对方法。
此处亦使用光学编码器解释。增量方式仅有一列狭缝, 而绝对方式则有多列狭缝。例如, 在有4列狭缝的情况下, 从二进制代码 (2进制数) 中可以知道从0000到1111的16种角度的绝对位置。
将开叉设为5列的话, 从00000到11111是32种。将狭缝的列增加2倍的话, 能知道00000000到11111111的256种的绝对位置的绝对位置。狭缝列的增加将导致角度变化的更高分辨率, 从而可以更精细地表达移动量。
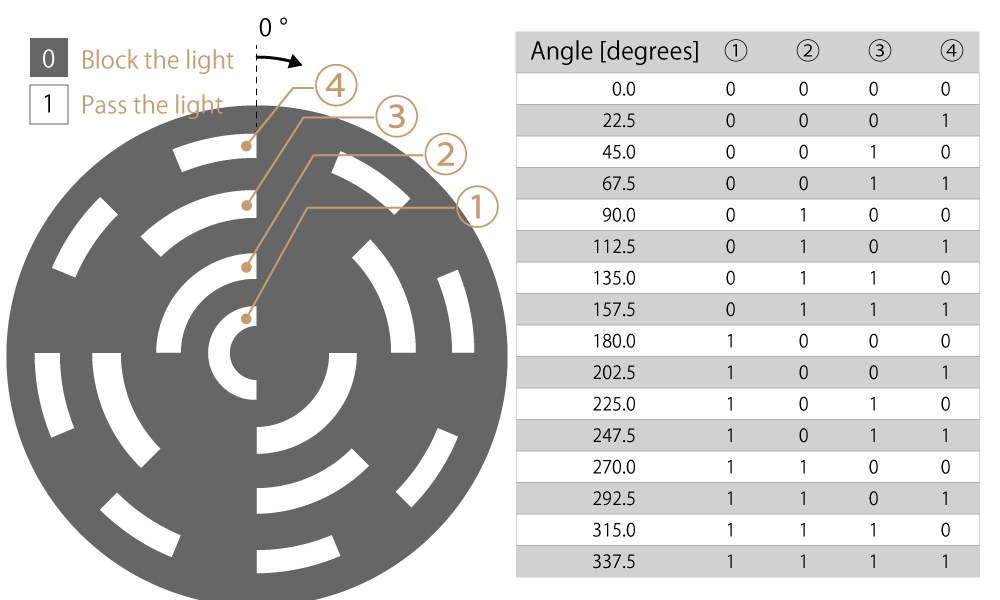 图 4a 狭缝4列的绝对方法旋转编码器
图 4a 狭缝4列的绝对方法旋转编码器
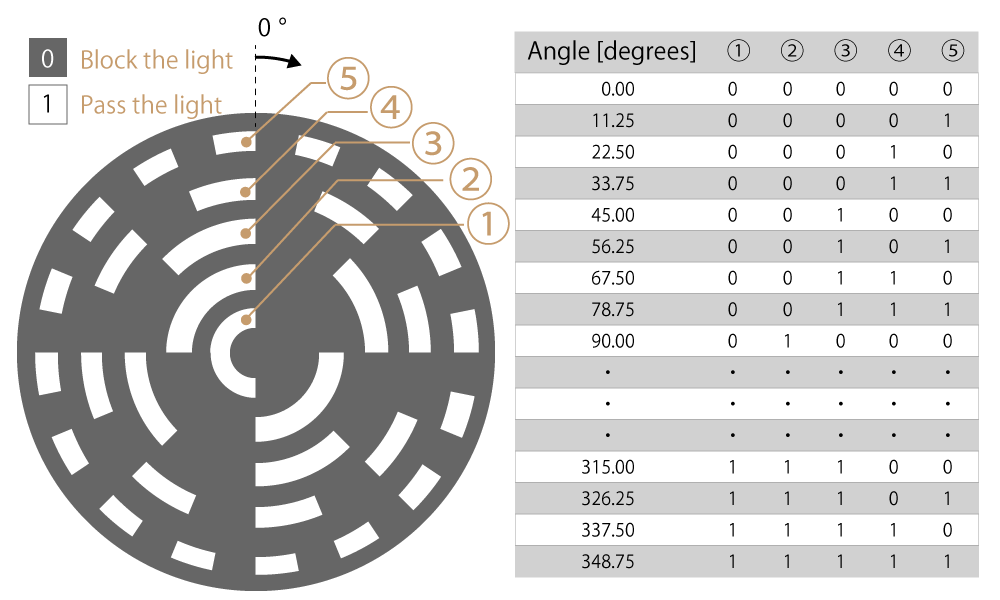 图 4b 狭缝5列的绝对方法回转编码器
图 4b 狭缝5列的绝对方法回转编码器
伪绝对方法, 以脉冲信号表示绝对角度
增量方法, 以表示绝对角度。除用于提取递延A相及B相脉冲的狭缝列外, 仅增加一个狭缝, 每周仅产生一次脉冲。该脉冲称为Z相 (定义见Zero)。以Z相脉冲为原点, 以A相、B相脉冲检测自原点的旋转量, 表现绝对角度的方式称为伪绝对方式。
 图 5a A、B及Z相顺时针波形
图 5a A、B及Z相顺时针波形
 图 5b A、B及Z相逆时针波形
图 5b A、B及Z相逆时针波形
3-2. 相对角度及绝对角度的好处及缺点
相对角度及绝对角度均有好处及缺点。
表示相对角度的增量方式, 由于只有1列 (假绝对的情况下为2列), 所以可以廉价地制造代码轮, 但在表现绝对角度的绝对方式的情况下, 由于切缝为多列, 所以要提高角度变化的分辨率的话, 代码轮的制造成本会变高。
另一方面, 停止马达的旋转, 关闭电源后再次启动的情况下, 如果是绝对方式, 可以检测到重新启动时的位置, 但在增量方式和疑似绝对方式的情况下, 由于被累计的角度数据被删除了, 因此无法检测出重新启动时的位置。
此外, 绝对方式具有信号传输方案的优势及缺点。
绝对方式包括输出二进制代码作为数字信号, 以及将二进制代码转换为模拟电压并输出。此外, 数字信号包括并行输出及串行输出, 其中, 并行输出通过多条信号线直接输出从多条狭缝获得的二进制代码, 串行输出通过一条信号线输出, 同时随时一条一条地依次切换并行输出的多条信号线。
 Figure 6. Relationship between angle information, binary code of digital output signal, and analog output voltage
Figure 6. Relationship between angle information, binary code of digital output signal, and analog output voltage
 图 7 并行输出信号及串行转换输出信号
图 7 并行输出信号及串行转换输出信号
虽然数字信号在传输时对噪音较强, 但并行输出的信号线较多, 串行输出需要较长时间进行通信, 因此, 电动机的旋转可能导致输出的代码与当前位置出现偏差。模拟信号仅需要一条时间延迟的信号线, 但其缺点为传输时噪音较弱。
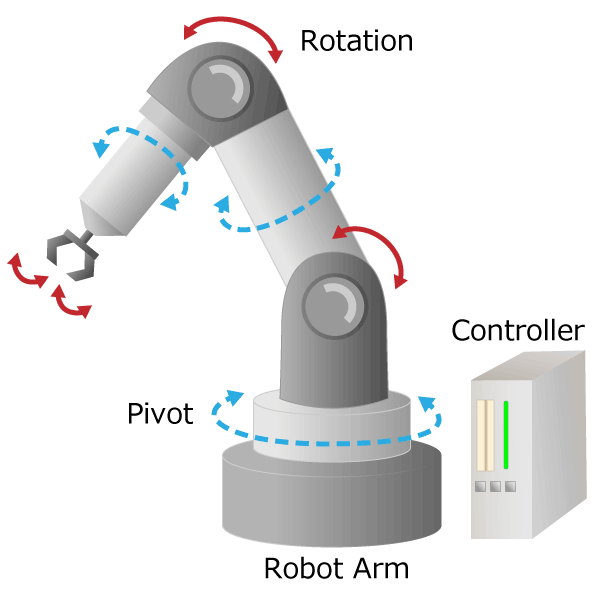
因此, 相对角度及绝对角度均有优势及缺点, 故请根据使用用途选择感测类型。例如, 检测马达轴及机械手的旋转角度需要绝对角度, 而检测马达转子磁极需要相对角度。想知道什么样的位置, 哪一个角度重要, 请根据"检测目的"分开使用。
总结
- 编码器表现旋转和角度信息的方法有相对角度和绝对角度2种。
- 相对角度的呈现方法包括增量方法, 绝对角度的呈现方法包括绝对方法及伪绝对方法。
- 由于相对角度及绝对角度均有好处及缺点, 故按「检测目的」分开使用。