-
产品

-
应用
-
支持
-
关于AKM
#01
编码器角色
编码器基础知识
本集团将向有意学习编码器的人士及有意识的人士解释其工作, 因为本公司其他部门的人士处理编码器。如能帮助这些人士, 真幸运。
概述
- 编码器指检测旋转角度及直线位移的传感器。
- 编码器用于需要高精度及快速操作的设备。
- 一边使用编码器检测电动机的速度及旋转角度, 一边进行控制的方法称为反馈控制。
1-2. 何为编码器?
编码器为编码 (encode) 旋转角度及线性位移的传感器。当我们首次听到编码器的名字时, 我们相信大多数人士将不会与 "旋转" 有关, 但我们的编码器名字来自英语 encode。
旋转 (检测旋转) 编码器称为旋转编码器, 而线性 (检测线性位移) 编码器称为线性编码器。
实际上, 旋转编码器通常仅指旋转编码器, 原因是旋转编码器的使用量极大。本集团将于连锁中基本上讨论旋转编码器。
1-3. 编码器用于何处?
虽然本集团已于开始时介绍, 但编码器已用于需要高精度及快速运作的设备。具体而言, 本集团为电机驱动设备。例如, 编码器广泛用于工业机器人、例如工厂使用的装配机器人、焊接机器人、无人搬运机、机械加工轮等。
尽管如此, 大部分工业机器人都没有看见最新的工厂, 工业机器人一直在工作。因此, 本集团将于下文详述编码器用于何处的情况。
自动化厂房 (智能厂房)
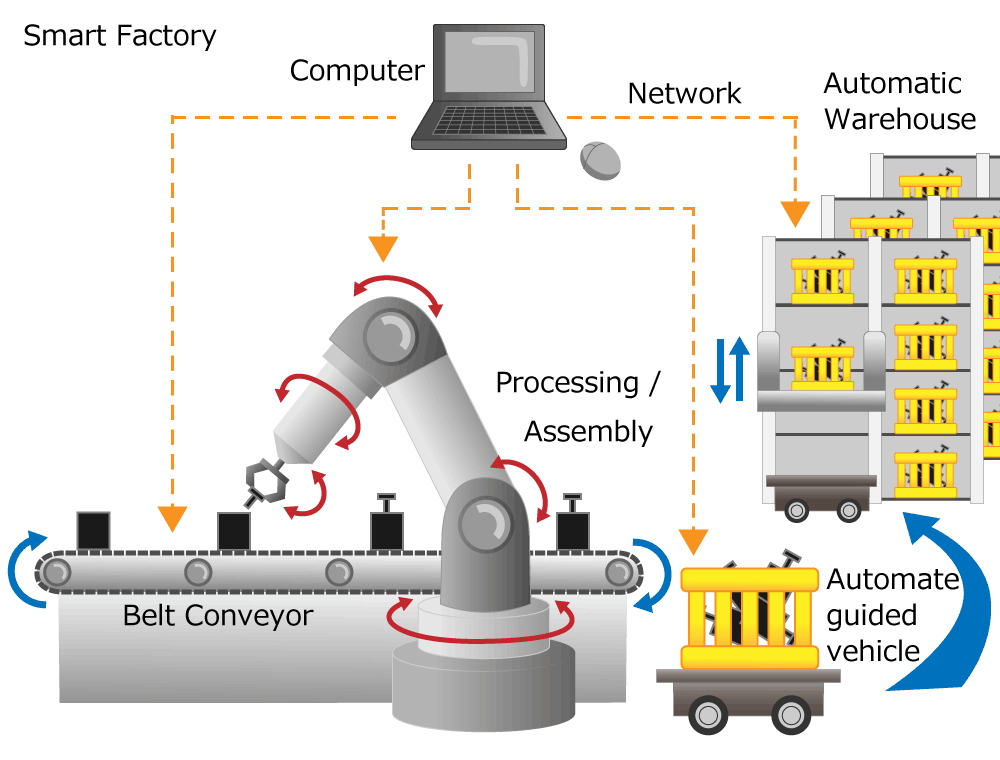 图 2 智慧工厂的状况
图 2 智慧工厂的状况
不同的生产设施用于电器及汽车生产厂房。由金属制成零部件的机床由电脑控制, 可以用一台机床进行多种加工、包括钻孔、开槽等。该机床被称为加工中心。制成的零部件送往装配工厂, 并由工业机器人 (如专用装配机及手臂式机器人) 自动装配。
在设计、零部件加工、储存、管理、运输、装配及所有制造过程中, 最新的厂房利用电脑及网络, 自动化进步。该「连接工厂」的想法被称为工业4.0, 该等工厂被称为智能工厂。
工业机器人
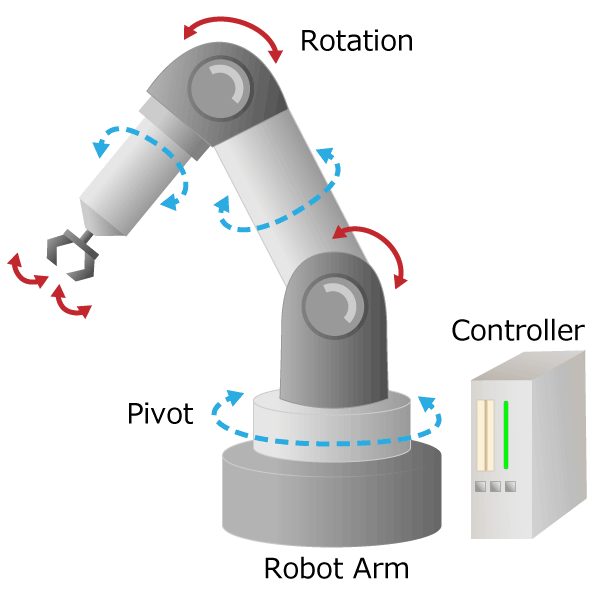
由于工业机器人工作严重、危险, 我们解放人类, 提升厂房生产力, 产品质量稳定。作为工业用机器人, 最广泛使用且实用的是多关节机器人, 该机器人具有多个关节 (关节), 相当于肩、肘、手腕, 而非人的颈、肩、腰, 并以人的手臂方式枢转 (枢转)、旋转 (旋转)、伸缩 (滑动) 的动作, 像人的腕一样动作的多关节机器人。通过执行机构将 控制器 输入的信号转换为运动, 以确保机器人微动。
 图 3 工业机器人的示意图
图 3 工业机器人的示意图
相当于人类肩膀至手腕的 "手臂" 部分称为机械手, 相当于人类手腕至指尖的 "手" 部分称为末端执行器。工业机器人通过改变末端执行器, 不仅能抓住物体, 而且能够应对喷漆作业及焊接作业。在机器人及机床展览会上, 有意观看多个公司所展示的机器人。
致动器
机器人 致动器 由于其小型化, 高精度, 故使用马达。实际上, 通过在马达的输出轴上集成与自行车变速箱 (齿轮) 相同的减速器 (减速器), 减小马达速度, 使旋转转动时的旋转力 (扭矩) 变大的驱动器, 以及通过螺丝使马达的旋转运动变为直线的往复运动, 在运动方向上可获得巨大力的电动滑块。而且, 本集团亦可在电动机及机器人的展览会上查阅其实物。
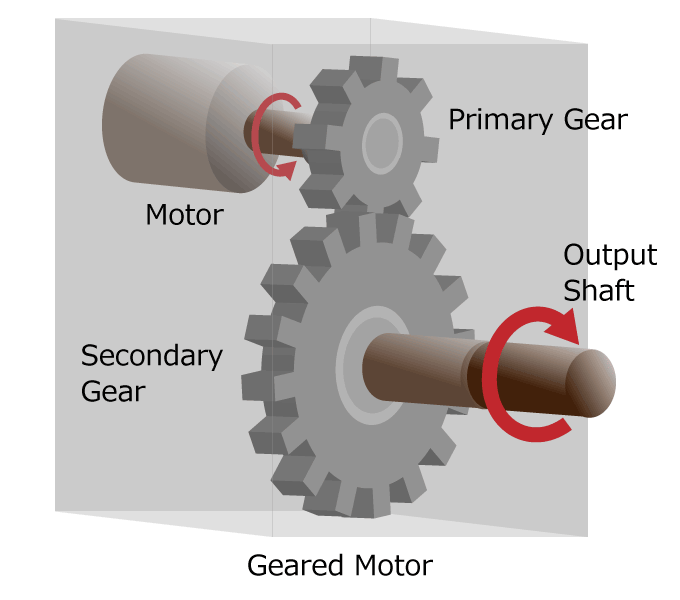 图 4a 减速器的示意图
图 4a 减速器的示意图
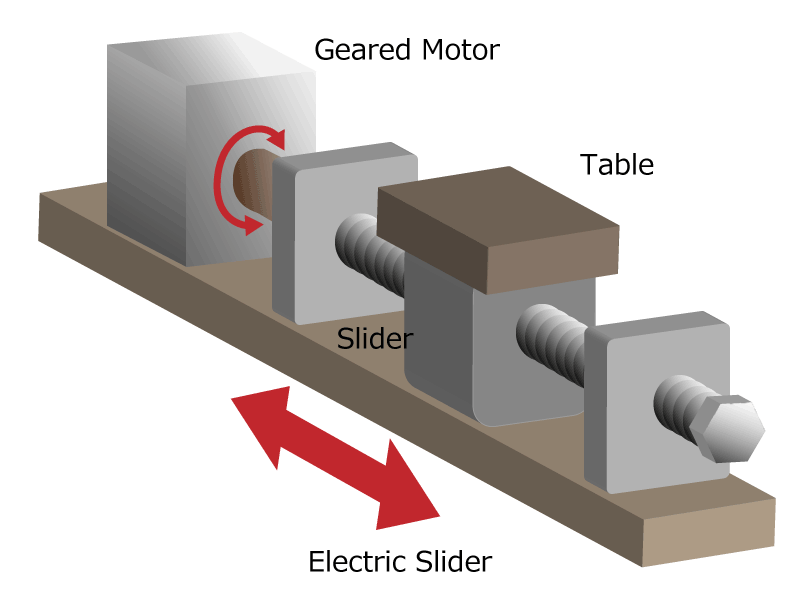 图4b 滑块的示意图
图4b 滑块的示意图
伺服电机
由于电动机的种类不同, 我们难以理解。我们将专注于编码器所使用的电动机, 并予以介绍。
将连续旋转运动及直线运动的速度保持不变, 或准确控制一次控制的旋转角及移动距离的机构称为伺服机构, 将用于对设备进行相关控制的电动机称为伺服电动机。伺服马达由无刷DC马达或AC马达、编码器、伺服放大器 (也称为驱动器) 3件组构成。
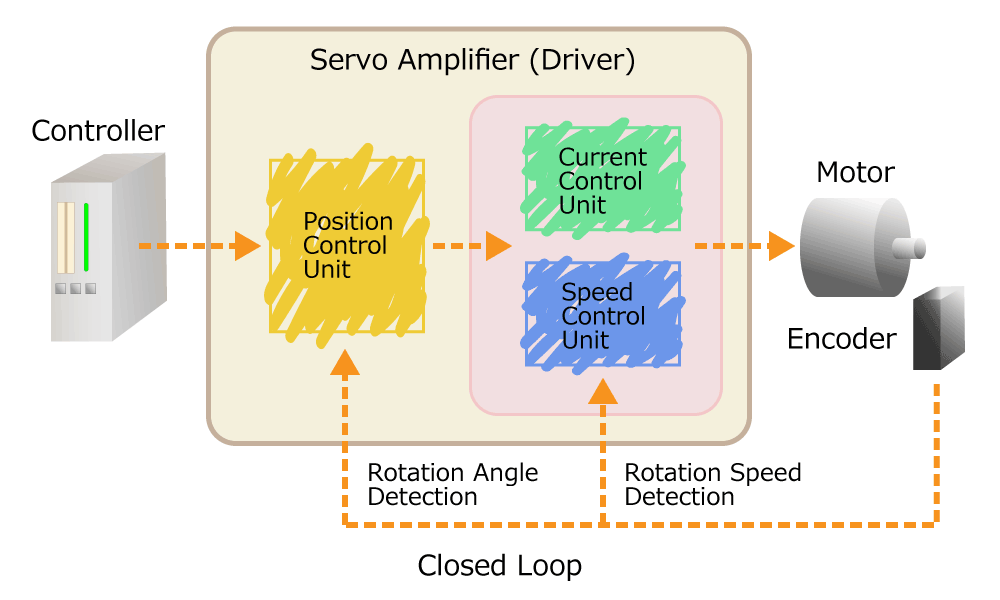 图 5 伺服电动机的构成概念图
图 5 伺服电动机的构成概念图
为保持无刷直流电机及交流电机的恒定转速, 本集团会使用编码器检测其转速。如果比设定的转速慢的话, 为了使马达快速转动, 如果旋转速度过快的话, 伺服放大器就会控制, 使马达的旋转速度慢。为准确控制电机的旋转角度, 编码器亦用于检测旋转角度。控制目标旋转角度, 同时厘定是否已达到目标旋转角度。因此, 在使用编码器检测电动机速度及转角的同时进行控制的方法被称为反馈控制 (闭环方式)。
步进电机
本公司将介绍其他电动机示例。步进电动机为输入一脉冲信号时以一定角度旋转的电动机。步进电动机亦以非反馈方式 (开环方式) 使用, 原因为电动机的转角及速度由施加至电动机的脉冲信号数目及脉冲间的间隔决定。
该方法的特点为简化系统, 因为不使用编码器。然而, 由于步进电动机一直以最大电流流动, 以防止 失步, 因此, 本集团的效率较低。因此, 通过使用编码器确认是否按指示旋转并进行反馈控制, 不再需要继续向电动机供应最大电流, 从而降低系统的消耗。
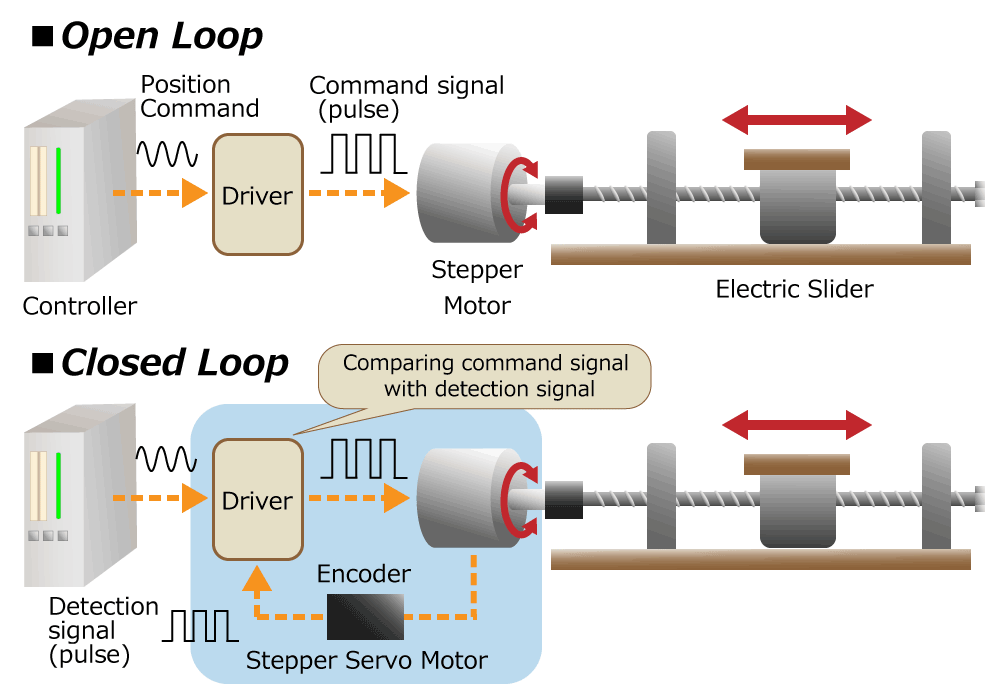 图 6 步进电动机的使用实例
图 6 步进电动机的使用实例
此外, 本集团通过用编码器掌握负载状况, 在马达不失步的情况下, 尽可能提高致动器的工作速度, 从而提高工作生产率。有时将步进电动机称为步进伺服电动机。
总结
- 编码器指检测旋转角度及直线位移的传感器。
- 编码器用于需要高精度及快速操作的设备。
- 一边使用编码器检测电动机的速度及旋转角度, 一边进行控制的方法称为反馈控制。