-
产品

-
应用
-
支持
-
关于AKM
#06
磁编码器的角度误差
编码器基础知识
本篇是连载第六章,将继续向大家介绍我们以往总结的经验。
如果能帮助到想学习编码器、想了解其工作原理的人,将是我们的荣幸。
本章介绍磁编码器的角度误差。
总结
- 使编码器远离产生磁场的物体(磁铁、电磁铁)及容易传导磁性的物体(导磁体)可以防止输入到霍尔元件中的磁场失真。
- 加强磁场信号,可以减小电气干扰导致的角度误差。
- 旋转角度传感器IC内置霍尔元件、AD转换器、运算电路,灵敏度及性能偏差小,能减小温度变化导致的误差,且具有防止安装偏差的自定位效果。
6-1. 磁编码器的角度误差是怎么产生的?
Shaft-End配置下,旋转轴、永磁体及霍尔元件的中心呈同一直线,理论上利萨如图形为正圆形,角度检测误差为零。但现实中,由于某些因素导致利萨如图形不呈正圆形,产生角度检测误差。这里介绍几种导致误差的代表性因素。
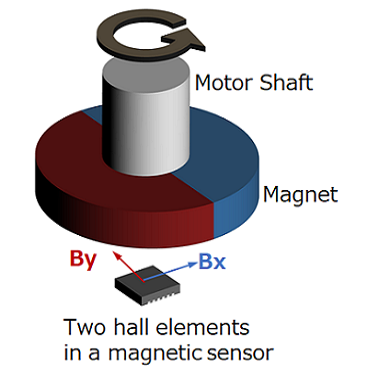
接下来将通过由径向磁化磁铁和检测横向磁场强度的霍尔元件构成的磁编码器,对工作原理进行说明。
干扰磁场
永磁体在受到横向干扰磁场的影响时会产生角度误差。例如,在X轴方向输入干扰磁场将导致利萨如图形的中心向X轴方向偏移。此时,旋转角度θ只有在 0°和180°时误差为零,除此之外都会产生角度误差。
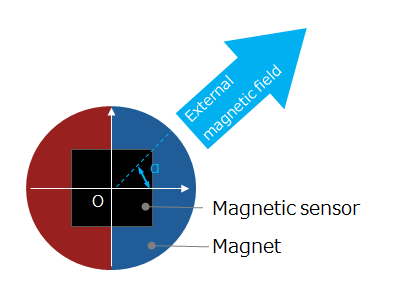 图6-1a 从永磁铁横向输入干扰磁场
图6-1a 从永磁铁横向输入干扰磁场
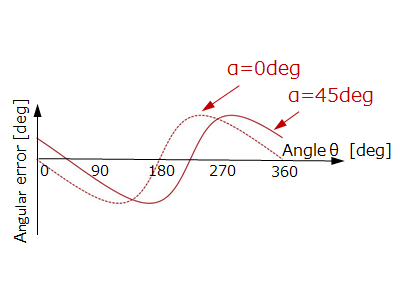 图6-1b X轴方向输入干扰磁场后的角度误差
图6-1b X轴方向输入干扰磁场后的角度误差
图6-1c显示在X轴方向(α = 0°)输入干扰磁场时的利萨如图形和角度误差。旋转角度θ为0°、180°时,角度误差为零,0~180°之间相位滞后,180°~360°之间相位超前。
 图6-1c 0°方向输入干扰磁场时的利萨如图形和角度误差
图6-1c 0°方向输入干扰磁场时的利萨如图形和角度误差
图6-1d显示在α = 45°方向输入干扰磁场时的利萨如图形和角度误差。旋转角度θ为 45°、225°时角度误差为零,45~225°之间相位滞后,225°~45°之间相位超前。
 图6-1d 45°方向输入干扰磁场时的利萨如图形和角度误差
图6-1d 45°方向输入干扰磁场时的利萨如图形和角度误差
霍尔元件的安装偏差(轴偏心)
霍尔元件的安装偏差(轴偏心)会导致角度误差。霍尔元件和永磁体的中心错位,导致输入到霍尔元件中的磁场失真。
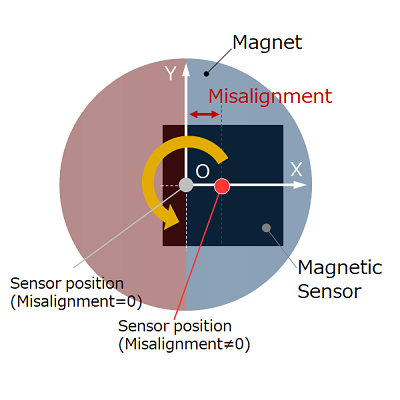 图6-2a 霍尔元件的轴偏心
图6-2a 霍尔元件的轴偏心
例如,当霍尔元件沿X轴方向偏移时,旋转角度θ为 0°、90°、180°、270°时,角度误差为零,在0~90°和180~270°之间相位超前,在90~180°和270~0°之间相位滞后。
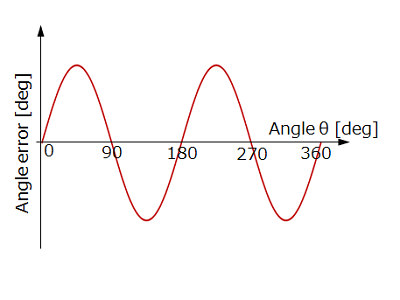 图6-2b X轴方向上轴偏心时的角度误差
图6-2b X轴方向上轴偏心时的角度误差
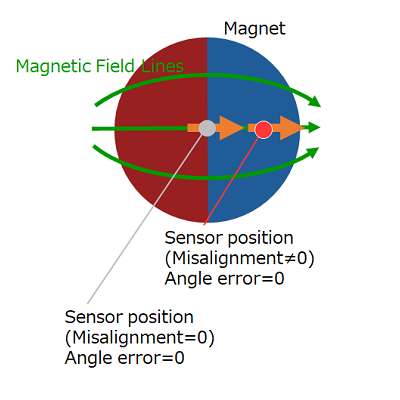 θ = 0°
θ = 0°
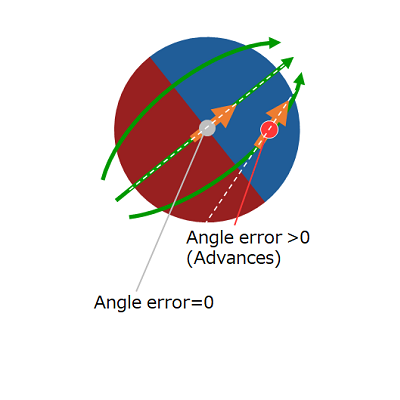 θ = 45°
θ = 45°
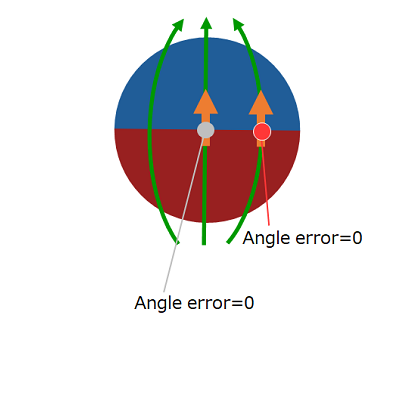 θ = 90°
θ = 90°
 θ = 135°
θ = 135°
图6-2c X轴方向上轴偏心时向霍尔元件中输入的磁场
(θ = 0°、45°、90°、135°)
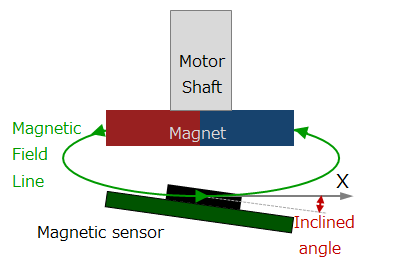
霍尔元件的安装倾斜
霍尔元件的安装倾斜会导致角度误差。即使霍尔元件和永磁体的中心没有偏移,但是安装倾斜会导致在倾斜方向输入的磁场变弱,利萨如图形变为椭圆形。
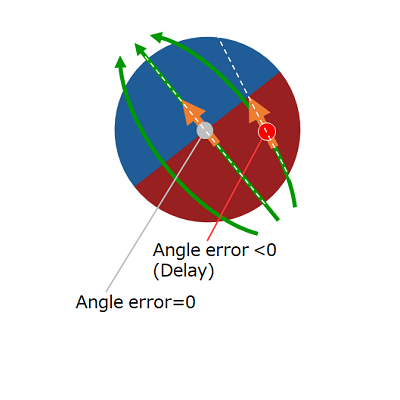
例如,当霍尔元件相对X轴方向倾斜时,旋转角度θ为0°和180°时,输入到霍尔元件中的磁场变弱,角度为90°和270°时,磁场强度不受倾斜影响,利萨如图形呈X方向半径偏小的椭圆形。旋转角度θ为 0°、90°、180°、270°时,角度误差为零,在0~90°和180~270°之间相位超前,在90~180°和270~0°之间相位滞后。
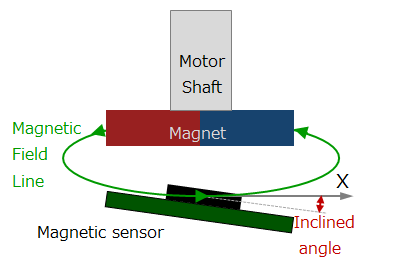 图6-3a 霍尔元件的安装倾斜
图6-3a 霍尔元件的安装倾斜
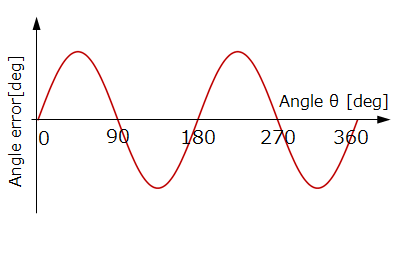 图6-3b 向X轴方向倾斜时的角度误差
图6-3b 向X轴方向倾斜时的角度误差
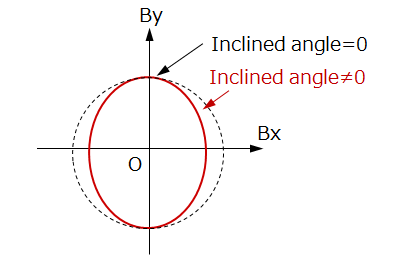 图6-3c 向X轴方向倾斜时的利萨如图形
图6-3c 向X轴方向倾斜时的利萨如图形
此外,永磁体的轴偏心、永磁体的倾斜常被误认为是角度误差的重要原因,但实际上永磁体存在轴偏心或倾斜并不会发生角度检测误差。
这是因为,即使磁铁在轴偏心的状态下旋转,输入到IC中的磁场强度不会因为角度变化而变化,利萨如图形还是呈正圆形。但是,由于磁传感器检测到的横向磁场强度本身变小,检测角度中包含的干扰误差影响相对变大。
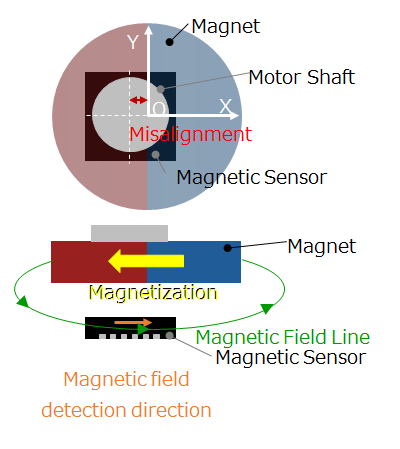 图6-4a 永磁体的轴偏心
图6-4a 永磁体的轴偏心
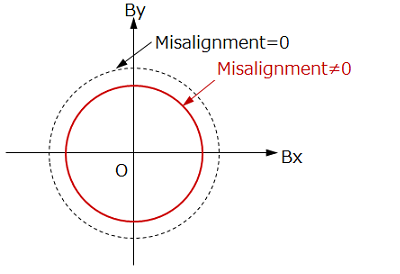 图6-4b 永磁体向X轴方向偏心时的利萨如图形
图6-4b 永磁体向X轴方向偏心时的利萨如图形
磁传感器和电子元件的特性差异
构成磁编码器的霍尔元件和AD转换器属于电子元件。大批量生产的电子元件,由于制造差异,会在电气特性上产生个体差异。例如,霍尔元件性能不均匀,会像受到干扰磁场影响一样,产生角度误差。假设,检测X轴磁场的霍尔元件与检测Y轴磁场的霍尔元件的灵敏度不同,利萨如图形就会像霍尔元件安装切斜时一样,呈椭圆形。同样,AD转换器的性能不均匀及灵敏度个体差异也是导致角度误差的主要因素。
6-2. 如何减小磁编码器的角度误差?
Shaft-End配置下利萨如曲线呈正圆形,则角度误差为零。但是这只是理想状态,没有干扰磁场、霍尔元件安装无轴偏心无倾斜、电子元件特性均匀且无灵敏度差异的批量生产条件是不存在的。
阻止系统在外力和环境干扰的影响下产生变化的内部体系或特性被称为鲁棒性。
为了减小批量生产的编码器的误差,需要在设计上增强鲁棒性。也就是说,要在考虑到干扰磁场、安装误差、安装倾斜、电子元件特性不均匀等因素的基础上,设计出不容易产生角度误差的编码器。
屏蔽干扰磁场
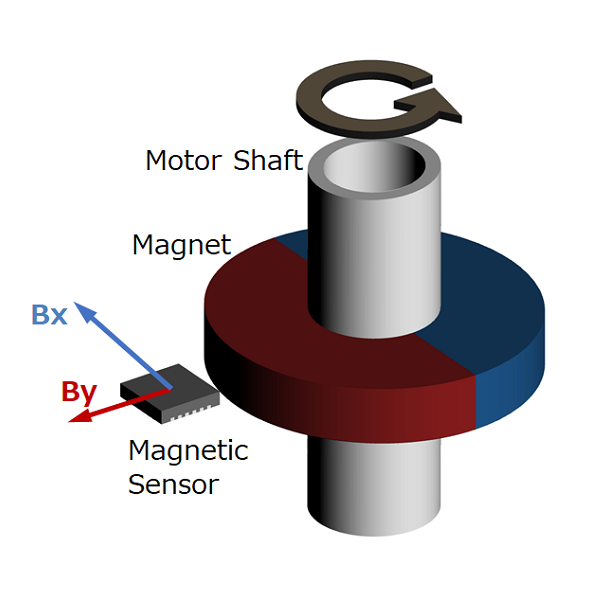
使编码器远离产生磁场的物体(磁铁、电磁铁)及容易传导磁性的物体(导磁体)可以防止输入到霍尔元件中的磁场失真。例如,使用非磁性材料制作电机旋转轴上固定磁铁用的治具,是非常有效的方法。另外,密封编码器周围的导磁体,也可以防止磁场干扰。再如,对于检测横向磁场的霍尔元件,采用横向密封也非常有效。将霍尔元件安装在环形磁铁的中心,环形磁铁本身同样能发挥密封效果。
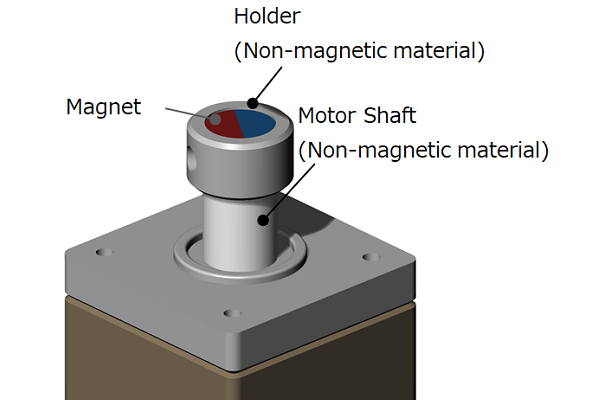 图6-5a 电机旋转轴和磁铁的示意图
图6-5a 电机旋转轴和磁铁的示意图
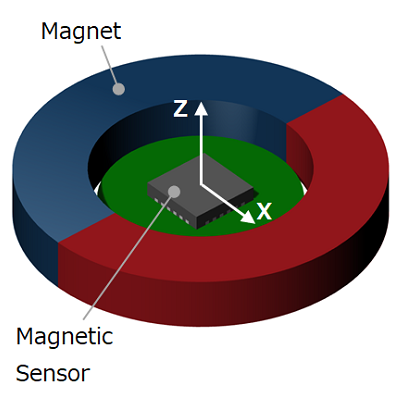 图6-5b 霍尔元件安装在环形磁铁的中心
图6-5b 霍尔元件安装在环形磁铁的中心
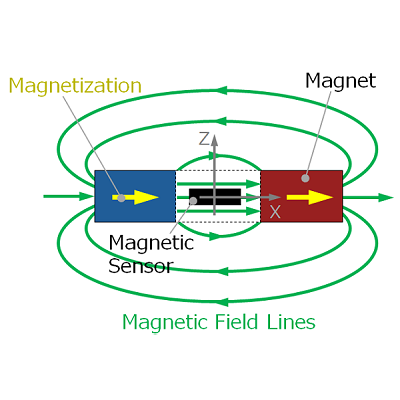 图6-5c 霍尔元件在环形磁铁中心时的磁场分布
图6-5c 霍尔元件在环形磁铁中心时的磁场分布
减少安装误差的影响
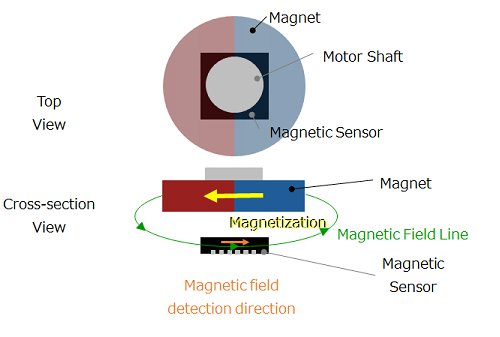 图6-6a 径向磁化磁体搭配检测横向磁场强度的霍尔元件
图6-6a 径向磁化磁体搭配检测横向磁场强度的霍尔元件
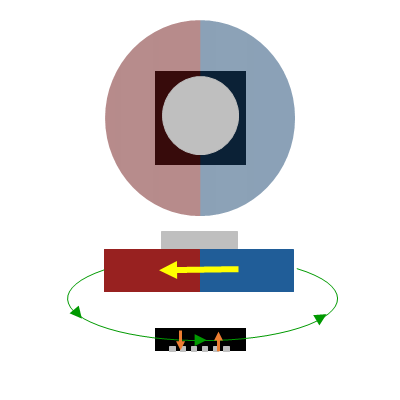 图6-6b 径向磁化磁体搭配检测横向磁场强度的霍尔元件
图6-6b 径向磁化磁体搭配检测横向磁场强度的霍尔元件
在第五章介绍了磁编码器的工作原理和特点,检测横向磁场的霍尔元件搭配横向磁场均匀分布的磁铁,可以减小轴偏心导致的角度误差。
加强霍尔元件的输入磁场
霍尔元件的信号输出与输入磁场强度成正比。霍尔元件属于电阻器类器件,无论磁场强度如何,都会自带一定程度的干扰。因此,通过提高霍尔元件的输入磁场强度,信号输出成分/干扰成分的比率会增大,可以减小干扰导致的角度误差。
使用内部集成所有电子元件的旋转角度传感器
X轴用、Y轴用的霍尔元件和AD转换器是搭载在同一硅(Si)芯片上的,因此,与元件单独组装相比,灵敏度差异小,温度特性也一致。因此,可降低arctan(By/Bx)计算所得出的旋转角度θ(参照第五章)的误差。
另外,温度变化会影响霍尔元件环氧树脂的封装应力,封装应力会导致霍尔元件性能差异。将霍尔元件安装到方形封装的正中央,可以减轻温度变化导致的性能差异。并且,在封装的四边配置端子,能够防止与基板的安装偏差,具有自定位效果。
总结
- 使编码器远离产生磁场的物体(磁铁、电磁铁)及容易传导磁性的物体(导磁体)可以防止输入到霍尔元件中的磁场失真。
- 加强磁场信号,可以减小电气干扰导致的角度误差。
- 旋转角度传感器IC内置霍尔元件、AD转换器、运算电路,灵敏度及性能偏差小,能减小温度变化导致的误差,且具有防止安装偏差的自定位效果。