-
製品情報

-
アプリケーション
-
サポート
-
AKM について
#06
磁気式エンコーダーの角度誤差
エンコーダー 基礎知識
こんにちは。エンコーダー兄妹です。わたしたちがいままでに得た知識を整理してみなさんに紹介している連載の今回は第 6 話です。これからエンコーダーを勉強したい人、自分はエンコーダーを扱っていないけど社内の他部署の人がエンコーダーを扱っているので仕事内容を知りたい人、長男だから我慢して我慢して強くなれる理由を知った人・・・そんな人たちのお役に立てたら幸いです。
前回は磁気式エンコーダーの動作原理と特長について紹介しました。今回は磁気式エンコーダーの角度誤差について解説します。
まとめ
- 磁気を発生するもの (磁石・電磁石) や磁気を通しやすいもの (磁性体) をエンコーダーから遠ざけるによってホール素子に入力される磁界が歪むことを防ぐ。
- ホール素子に入力する磁界を強くすると電気的なノイズによる角度誤差が小さくなる。
- 磁気式エンコーダーに必要なホール素子、AD コンバーター、演算回路を内蔵している回転角センサー IC は感度ばらつきやオフセットが小さく、温度変動による誤差を軽減し、実装ずれを防ぐセルフアライメント効果もある。
6-1. 磁気式エンコーダーの角度誤差はどうして発生するの?
回転軸と永久磁石とホール素子の中心が同一線上に揃う Shaft-End 配置では、理論上はリサージュ図形が真円になり角度検知誤差がゼロになります。しかし現実にはいくつかの要因によってリサージュ図形が真円でなくなり角度検知誤差が生じます。代表的な誤差要因を紹介します。
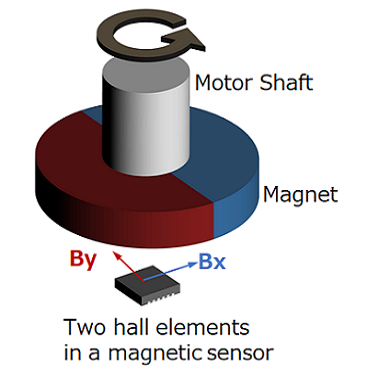
ここから先は、径方向に磁化された磁石と横方向の磁界の強さを検知するタイプのホール素子で構成される磁気式エンコーダーを使い、動作原理を解説していきます。
外乱磁界
永久磁石の横方向から入力される外乱磁界の影響で角度誤差が発生します。例えば X 軸方向に外乱磁界が入力された場合、リサージュ図形の中心が X 軸方向にオフセットします。このとき、回転角度 θ が 0° と 180° では角度誤差がゼロですが、それ以外では角度誤差が発生します。
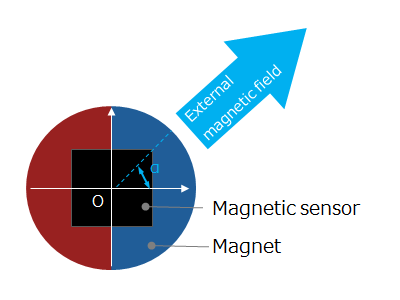 図 6-1a 永久磁石の横方向から入力される外乱磁界
図 6-1a 永久磁石の横方向から入力される外乱磁界
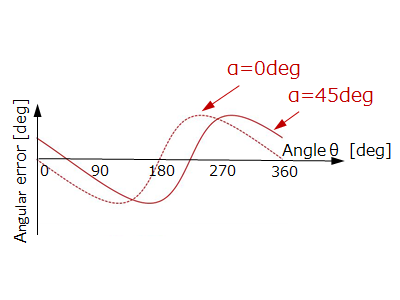 図 6-1b X 軸方向に外乱磁界が入力された場合の角度誤差
図 6-1b X 軸方向に外乱磁界が入力された場合の角度誤差
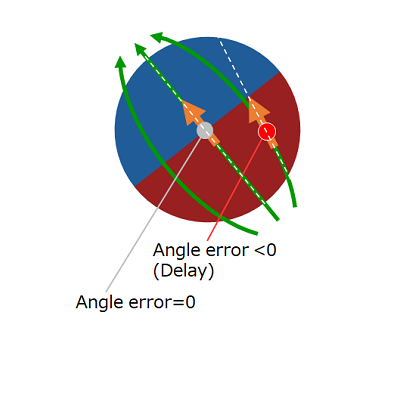
図 6-1c はX軸方向 (α = 0°) に外乱磁界が入力された場合のリサージュ図形と角度誤差です。回転角度θが 0°、180° では角度誤差がゼロですが、0~180° の間では位相が遅れ、180°~360°の間では位相が進みます。
 図 6-1c 0°の方向から外乱磁界が入力された場合のリサージュ図形と角度誤差
図 6-1c 0°の方向から外乱磁界が入力された場合のリサージュ図形と角度誤差
図 6-1d は α = 45° 方向から入力された場合のリサージュ図形と角度誤差です。回転角度 θ が 45°、225° では角度誤差がゼロですが、45~225° の間では位相が遅れ、225°~45° の間では位相が進みます。
 図 6-1d 45° の方向から外乱磁界が入力された場合のリサージュ図形と角度誤差
図 6-1d 45° の方向から外乱磁界が入力された場合のリサージュ図形と角度誤差
ホール素子の実装ずれ (軸ずれ)
ホール素子の実装ずれ (軸ずれ) によって角度誤差が発生します。ホール素子と永久磁石の中心がずれているためホール素子に入力される磁界が歪むことが原因です。
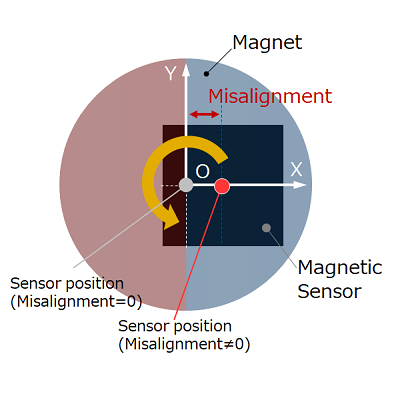 図 6-2a ホール素子の軸ずれ
図 6-2a ホール素子の軸ずれ
例えば、ホール素子がX軸方向に軸ずれしている場合、回転角度 θ が 0°、90°、180°、270° では角度誤差がゼロですが、0 ~ 90° と 180 ~ 270° の間では位相が進み、90 ~ 180° と 270 ~ 0° の間では位相が遅れます。
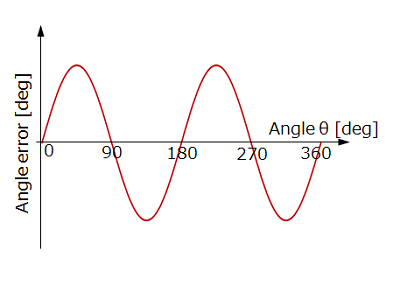 図 6-2b X 軸方向に軸ずれした場合の角度誤差
図 6-2b X 軸方向に軸ずれした場合の角度誤差
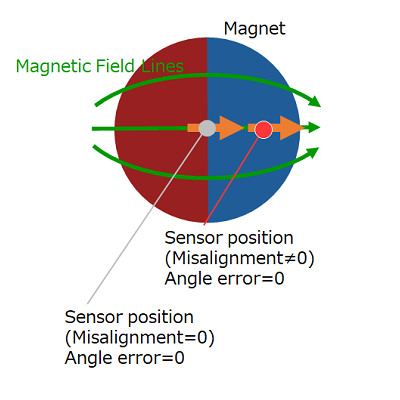 θ = 0°
θ = 0°
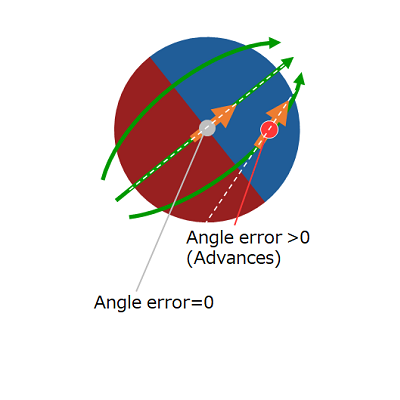 θ = 45°
θ = 45°
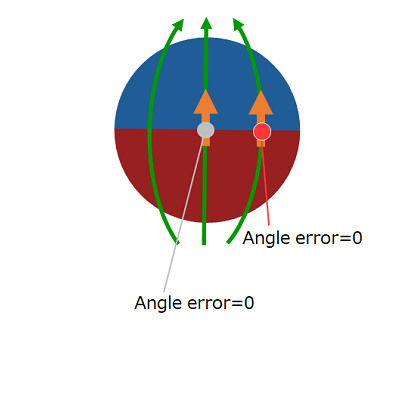 θ = 90°
θ = 90°
 θ = 135°
θ = 135°
図 6-2c X 軸方向に軸ずれした場合のホール素子に入力される磁界
(θ = 0°、45°、90°、135°)
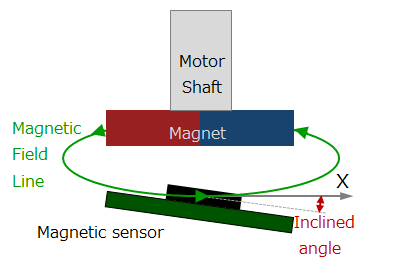
ホール素子の実装傾き
ホール素子の実装傾きによって角度誤差が発生します。ホール素子と永久磁石の中心はずれていませんが、傾いている方向から入力される磁界が弱くなるため、リサージュ図形が楕円になります。例えばホール素子が X 軸方向に対して傾いている場合、回転角度 θ が 0° と 180° ではホール素子に入力される磁界が弱くなりますが、90° と 270° のときは磁界の強さは傾きの影響を受けないため、リサージュ波形は X 方向の半径が小さい楕円形になります。回転角度 θ が 0°、90°、180°、270° では角度誤差がゼロですが、0 ~ 90° と 180 ~ 270° の間では位相が進み、90 ~ 180° と 270 ~ 0° の間では位相が遅れます。
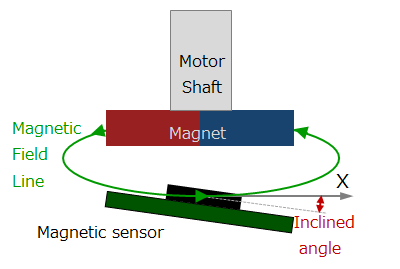 図 6-3a ホール素子の実装傾き
図 6-3a ホール素子の実装傾き
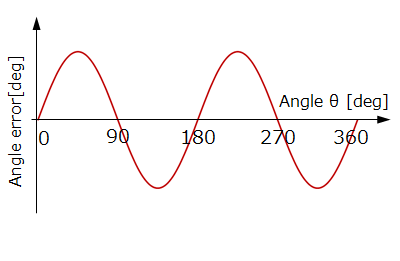 図 6-3b X 軸方向に傾いた場合の角度誤差
図 6-3b X 軸方向に傾いた場合の角度誤差
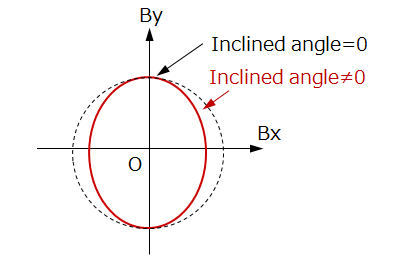 図 6-3c X 軸方向に傾いた場合のリサージュ図形
図 6-3c X 軸方向に傾いた場合のリサージュ図形
この他には永久磁石の軸ずれ、永久磁石の傾きが要因として考えられそうですが、実は永久磁石の軸ずれや傾きがあっても角度検知誤差は発生しません。なぜなら、磁石の軸がずれたまま回転しても、IC に入力される磁場の大きさは角度によって変わらないので、リサージュ図形は真円のままだからです 。ただし、磁気センサーが検知する横方向の 磁界の大きさ自体は小さくなってしまうため、検知角度に含まれるノイズ誤差成分が相対的に大きくなります。
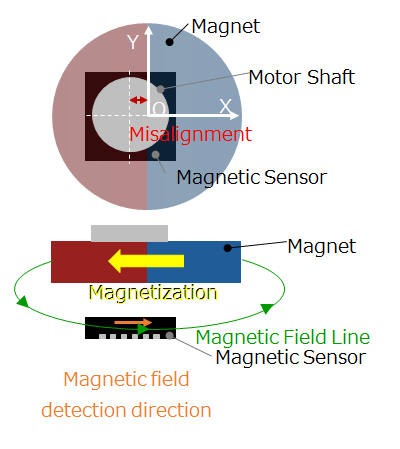 図 6-4a 永久磁石の軸ずれ
図 6-4a 永久磁石の軸ずれ
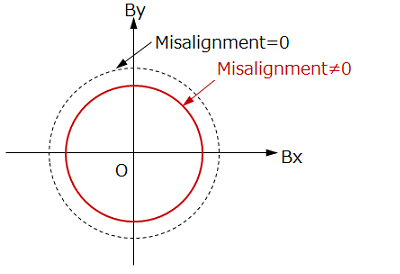 図 6-4b 永久磁石が X 軸方向に軸ずれした場合のリサージュ図形
図 6-4b 永久磁石が X 軸方向に軸ずれした場合のリサージュ図形
磁気センサーと電子部品の特性ばらつき
磁気式エンコーダーを構成するホール素子、AD コンバーターは電子部品です。大量生産される電子部品は製造ばらつきによって電気的特性に個体差があります。例えば、ホール素子のオフセットによって外乱磁界の影響と同じ理由で角度誤差が発生します。X 軸成分の磁界を検知するためのホール素子の感度と Y 軸成分の磁界を検知するためのホール素子の感度に差異があると、ホール素子の実装傾きと同じ理由でリサージュ図形は楕円形になります。同様に AD コンバーターのオフセットと感度ばらつきも角度誤差を発生させる要因になります。
磁気式エンコーダーの角度誤差を小さくするにはどうすればいいの?
Shaft-End 配置ではリサージュ図形が真円になると角度誤差がゼロになります。しかし、それはあくまで理想的な条件であって、外乱磁界がない環境で、ホール素子の実装ずれや実装傾きがなく、オフセットや感度ばらつきがない電子部品だけを使ってエンコーダーを大量生産することはできません。ある系が応力や環境の変化といった外乱の影響によって変化することを阻止する内的な仕組み、または性質のことをロバスト性と言います。大量生産されるエンコーダーの誤差を小さくするためにはロバスト性が高い設計をする必要があります。つまり、誤差要因となる外乱磁場、実装ずれ、実装傾き、電子部品の特性ばらつきがあっても角度誤差が発生しにくい設計にすることです。
外乱磁界を遮蔽する
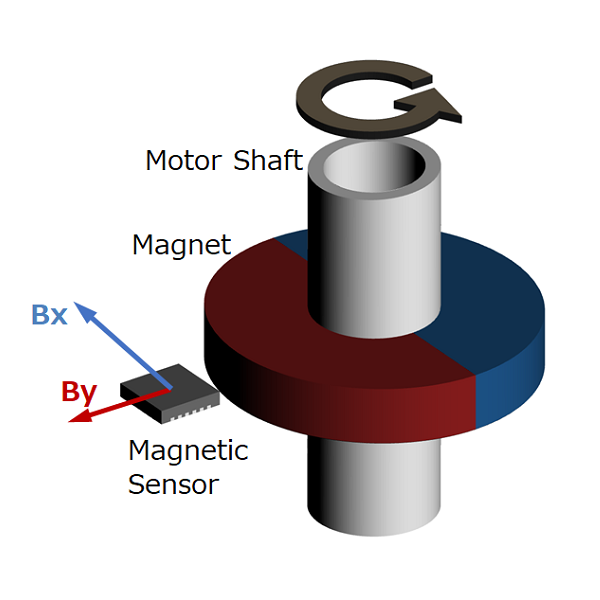
磁気を発生するもの (磁石・電磁石) や磁気を通しやすいもの (磁性体) をエンコーダーから遠ざけることによってホール素子に入力される磁界が歪むことを防ぎます。例えばモーターの回転軸や磁石を回転軸に固定する治具に非磁性の材料を用いることは非常に有効です。また、エンコーダーの周囲を磁性体でシールドすることで、外乱磁界の影響を防ぐことができます。例えば横方向の磁界を検知するホール素子に対しては、横方向をシールドで囲うことは非常に有効です。さらに、ホール素子をリング磁石の中心に配置することで、リング磁石自体がシールドと同じ効果を発揮します。
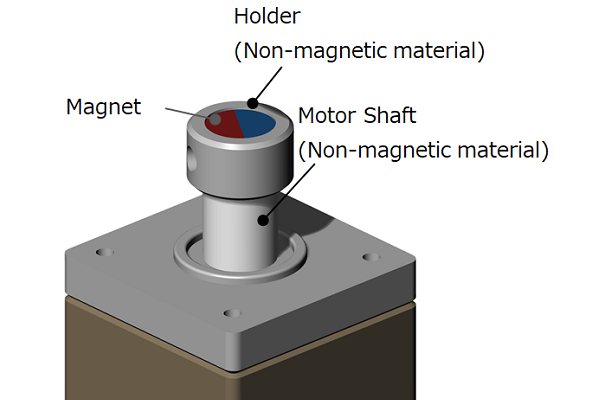 図 6-5a モーター回転軸と磁石の模式図
図 6-5a モーター回転軸と磁石の模式図
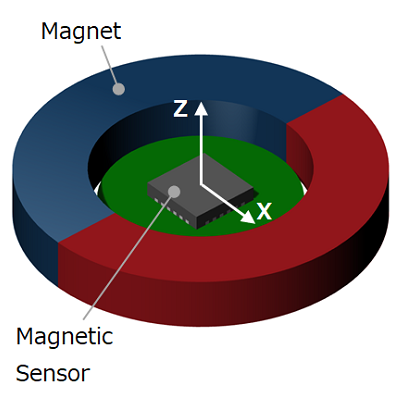 図 6-5b ホール素子をリング磁石の中心に配置
図 6-5b ホール素子をリング磁石の中心に配置
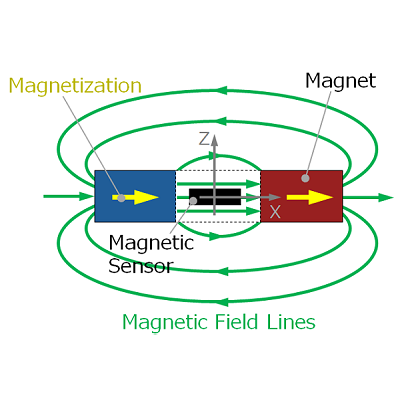 図 6-5c ホール素子をリング磁石の中心に配置したときの磁界分布
図 6-5c ホール素子をリング磁石の中心に配置したときの磁界分布
実装ずれの影響を小さくする
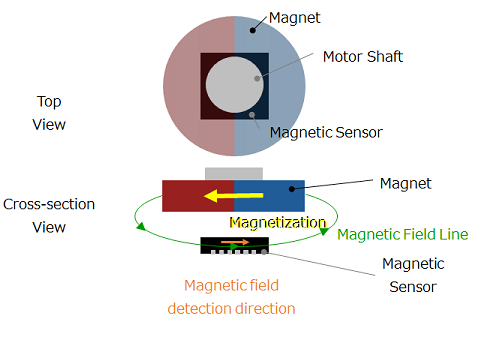 図 6-6a 径方向に磁化された磁石と横方向の 磁界の強さを検知するホール素子の組み合わせ
図 6-6a 径方向に磁化された磁石と横方向の 磁界の強さを検知するホール素子の組み合わせ
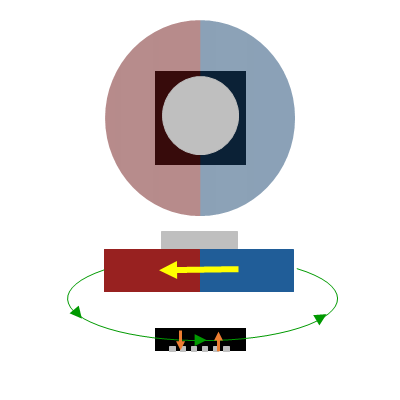 図 6-6b 径方向に磁化された磁石と縦方向の 磁界の強さを検知するホール素子の組み合わせ
図 6-6b 径方向に磁化された磁石と縦方向の 磁界の強さを検知するホール素子の組み合わせ
第 5 話の磁気式エンコーダーの動作原理と特長でも紹介したように、横方向の磁界を検知するホール素子と横方向に均一な磁界の領域が広い磁石を組み合わせることによって軸ずれによる角度誤差を小さくすることができます。
ホール素子に入力する磁界を強くする
ホール素子の信号成分は入力される磁界の強さに比例して大きくなります。一方、ホール素子は電気的には抵抗体なので、磁界の強さに関わらず一定量のノイズ成分を持っています。このため、ホール素子に入力される磁界を強くすることによって、信号成分/ノイズ成分の比率が大きくなりノイズによって発生する角度誤差を小さくすることができます。
すべての電子部品を内蔵した回転角センサーを使う
同じシリコン (Si) チップ上に X 軸用と Y 軸用のホール素子と AD コンバーターが搭載されているため、個別部品を組み合わせるよりも感度ばらつきが小さく、感度の温度特性も揃います。このため、arctan (By/Bx) の計算によって求められる回転角度 θ (第 5 話 参照) の誤差を軽減させることができます。
また、ホール素子はパッケージのエポキシ系樹脂から応力を受けてオフセットが温度変動しますが、正方形のパッケージの中央にホール素子を配置し応力がなるべくかからないようにすることで温度変動による誤差を軽減させることができます。さらに、パッケージの 4 辺に端子を置くこ とで基板実装時の実装ずれ (軸ずれ) を防ぐセルフアライメント効果もあります。
まとめ
- 磁気を発生するもの (磁石・電磁石) や磁気を通しやすいもの (磁性体) をエンコーダーから遠ざけるによってホール素子に入力される磁界が歪むことを防ぐ。
- ホール素子に入力する磁界を強くすると電気的なノイズによる角度誤差が小さくなる。
- 磁気式エンコーダーに必要なホール素子、AD コンバーター、演算回路を内蔵している回転角センサー IC は感度ばらつきやオフセットが小さく、温度変動による誤差を軽減し、実装ずれを防ぐセルフアライメント効果もある。
いかがでしたか?
今回は磁気式エンコーダーの角度誤差について解説しました。角度誤差の発生要因と対策方法をご理解いただけたと思います。
次回は Off-Axis 配置の磁気式エンコーダーについて解説します。それでは、また会いましょう。