-
产品

-
应用
-
支持
-
关于AKM
#05
磁编码器的工作原理和特点
编码器基础知识
本篇是连载第五章,将继续向大家介绍我们以往总结的经验。
如果能帮助到想学习编码器、想了解其工作原理的人,将是我们的荣幸。
本章介绍磁编码器的工作原理及特点
总结
- 磁编码器通过检测磁场变化得出旋转位置信息,转换成电气信号输出。
- Shaft-End配置下的磁编码器由径向充磁磁铁和检测横向磁场强度的霍尔元件组成,对轴偏心的容忍度高。
- 磁编码器可用于要求环境耐受性强、小型轻量、可靠性高的应用中。
- 磁编码器能提升精度和分辨率,可实现离轴检测,逐渐出现在光学编码器的市场上。
5-1.磁编码器的构造
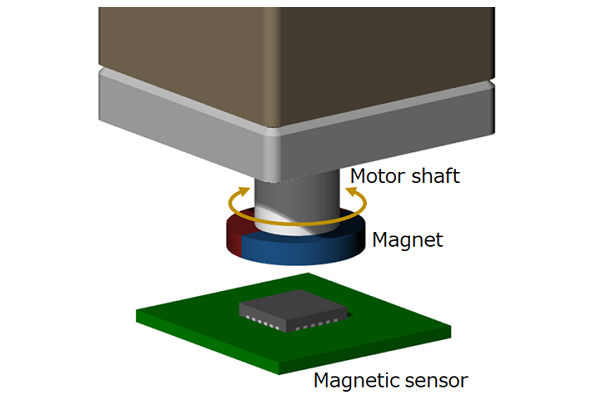 图5-1 磁编码器结构示意图
图5-1 磁编码器结构示意图
磁编码器通过检测磁场变化得出旋转位置信息,并将其转换成电气信号输出。
较为简单的磁编码器是由永磁体和磁传感器构成的。永磁体安装在电机轴承等旋转体的顶端,磁传感器安装在永磁体磁场范围内的PCB板上。安装在电机轴承上的永磁体一旦开始旋转,磁传感器就能检测到磁场方向的变化,因此可以得出电机的旋转位置和旋转速度。
由霍尔元件(即磁传感器)与永磁体构成的磁编码器是如何将磁场变化量转换成角度信息的?接下来将对其工作原理进行详细说明。
霍尔元件是利用霍尔效应,输出与磁场强度等比的电压的磁传感器。
霍尔元件
磁编码器使用的霍尔元件由半导体材料制成,当前主要的半导体材料有,灵敏度高的铟锑(InSb)、温度特性稳定的镓砷(GaAs)、灵敏度和温度特性相对平衡的铟砷(InAs)等化合物半导体,以及能用在IC Die上的硅(Si)材料。
另外,霍尔元件分为检测纵向磁场强度和检测横向磁场强度的两种类型。(霍尔元件的详细说明请见《磁传感器基础知识》,如有兴趣请参考。)
永磁体
磁编码器上使用的永磁体一般是圆盘形(硬币形),在圆盘的径向或轴向方向充磁。只要满足编码器工作所需的磁感应强度,就可以自由选择磁铁的材料和尺寸。
一般情况下,根据使用目的,可以从温度特性良好的钐钴(SmCo)系、小型轻量化的钕铁硼(Ne-Fe-B)系,及价格低廉的铁氧体系磁铁中选择。
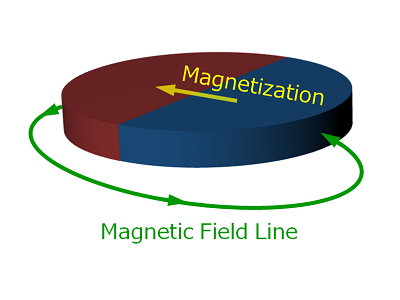 图5-2a 径向磁化磁铁
图5-2a 径向磁化磁铁
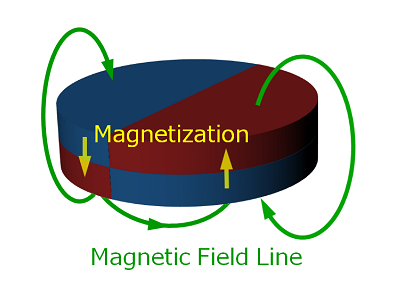 图5-2b 轴向磁化磁铁
图5-2b 轴向磁化磁铁
永磁体和霍尔元件的配置
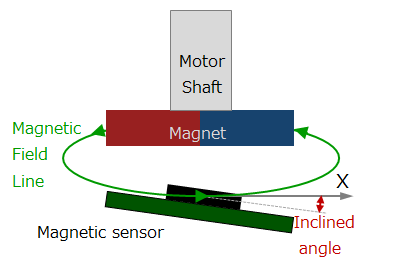
磁编码器的理想状态是旋转轴、永磁体及霍尔元件的中心在同一直线上。这样的配置方式被称为Shaft-End(轴端配置)。但即使是Shaft-End配置,实际上也会存在“轴偏心”的细微安装误差。
一旦出现轴偏心,霍尔元件检测到的磁场强度就会发生变化,进而导致检测的角度精度出现误差。要全面消除轴偏心是非常困难的。在Shaft-End配置下,如果将霍尔元件安装在横向磁场均匀的区域内,那么即使存在轴偏心,输入磁场强度也不会有太大变化。
因此,与检测纵向磁场强度的霍尔元件相比,检测横向磁场强度的霍尔元件可以减小轴偏心对角度误差的影响。
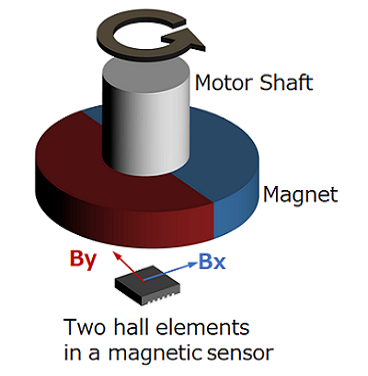
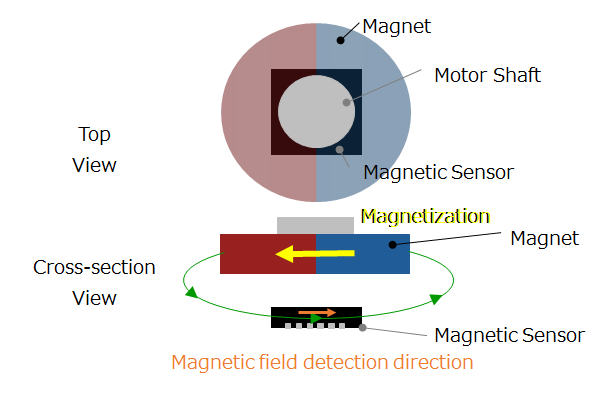 图5-3a 径向磁化磁铁搭配检测横向磁场强度的霍尔元件
图5-3a 径向磁化磁铁搭配检测横向磁场强度的霍尔元件
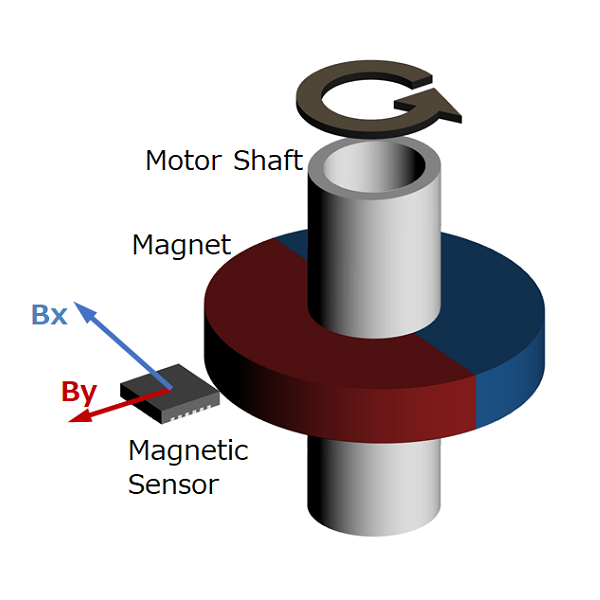
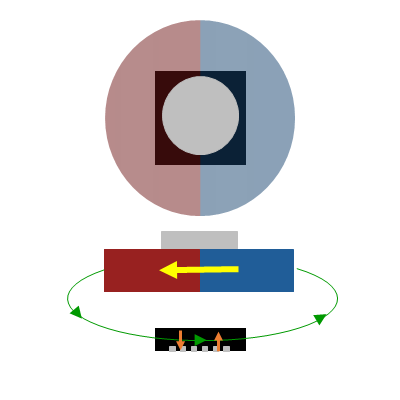 图5-3b 径向磁化磁铁搭配检测纵向磁场强度的霍尔元件
图5-3b 径向磁化磁铁搭配检测纵向磁场强度的霍尔元件
有时会选择轴向磁化的永磁体来减弱侧面漏出的磁场,从而降低侧面漏出磁场对周围设备造成的不良影响,但是与径向磁化的磁铁相比,轴向磁化磁铁的磁场区域更小,轴偏心导致的角度误差相对更大。
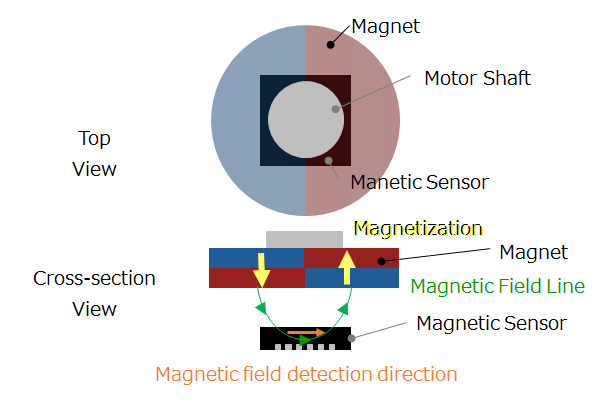 图5-4a 轴向磁化磁铁搭配检测横向磁场强度的霍尔元件
图5-4a 轴向磁化磁铁搭配检测横向磁场强度的霍尔元件
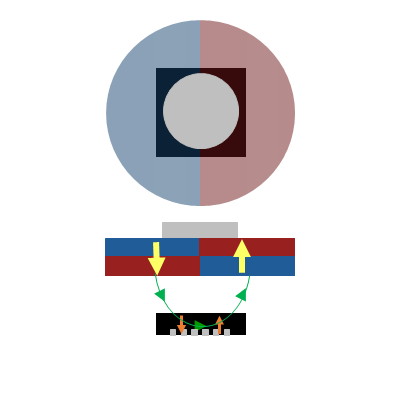 图5-4b 轴向磁化磁铁搭配检测纵向磁场强度的霍尔元件
图5-4b 轴向磁化磁铁搭配检测纵向磁场强度的霍尔元件
如上所述,Shaft-End配置的好处是,将径向磁化磁铁和检测横向磁场强度的霍尔元件相结合,就可以很容易地实现抗轴偏心的编码器。实际上,除了Shaft-End方式,霍尔元件还有一种Off-Axis安装方式,将在后续章节详细介绍。
接下来,将对由径向磁化磁铁和检测横向磁场强度的霍尔元件组成的磁编码器的工作原理进行说明。
5-2. 磁编码器的工作原理
霍尔元件检测旋转运动中的磁场分布变化,并将其转换为电气信号
电机轴旋转时,安装在轴端的永磁体所产生的磁场也会旋转,而在旋转轴的中心区域,旋转磁场保持一定的强度不变。霍尔元件检测该磁场分布变化,将其转换成电气信号。由于霍尔元件只能检测单一方向的磁场强度,为了检测旋转位置,需要分别配置检测旋转磁场X轴方向磁场强度(Bx)和Y轴方向磁场强度(By)的霍尔元件。
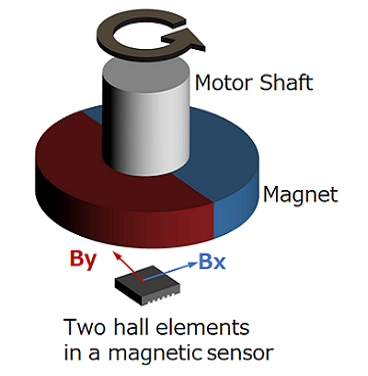 图5-5a Shaft-End配置磁编码器的结构示意图
图5-5a Shaft-End配置磁编码器的结构示意图
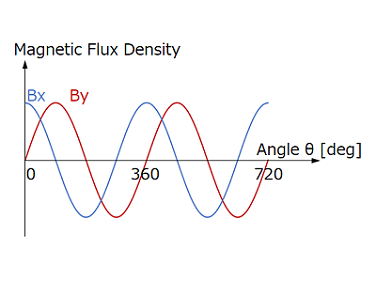 图5-5b 霍尔元件检测到的磁场强度
图5-5b 霍尔元件检测到的磁场强度
将霍尔元件的电气信号转换成角度信息
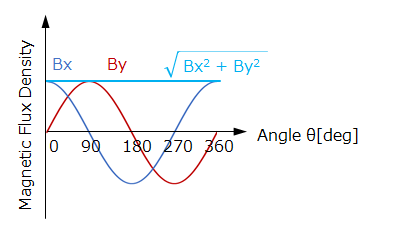 图5-6a X轴磁场Bx和Y轴磁场By
图5-6a X轴磁场Bx和Y轴磁场By
霍尔元件将X轴和Y轴的磁场信息转换为电气信号,然后由AD转换器转换成数字信号后发送到运算电路,再使用三角函数换算成角度信息。X轴和Y轴相互垂直所合成的平面图形被称为利萨如图形(或利萨如曲线),在没有轴偏心的Shaft-End配置下,磁场强度保持不变且不停旋转,可以得出很规则的正圆形利萨如图形,使用三角函数换算后的输出角度误差为零。另外,即使检测横向磁场强度的霍尔元件存在轴偏心,由于输入磁场几乎没有变化,所以输出的角度误差较小。
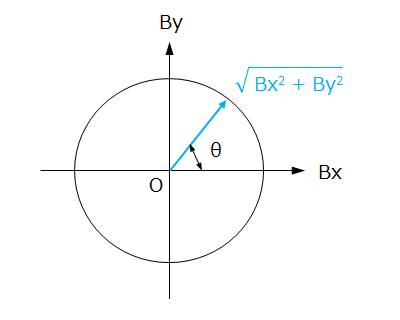 图5-6b 磁场强度的利萨如图形
图5-6b 磁场强度的利萨如图形
假设X轴为Bx,Y轴为By,通过arctan(By/Bx)计算能得出旋转角 θ 的绝对角度,这个角度可以用第三章介绍过的绝对值式输出。磁编码器从本质上来说是检测绝对角度的编码器。如果将绝对角度转换成A相B相Z相信息,可以作为脉冲信号通过增量式/模拟绝对值式输出。如果绝对角度信息的分辨率足够高,则可以输出360ppr、1000ppr、2500ppr、4000ppr等任意分辨率的脉冲信号。
旋转角度传感器IC
旋转角度传感器IC是内藏磁传感器、AD转换器和运算电路的电子元件,其中磁传感器是磁编码器的重要构成要素。旋转角度传感器IC和永磁体可以组装出简单的小型磁编码器,广泛应用于民用、工业、车载领域中。
5-3. 磁编码器的特点和主要应用
磁编码器的作用是检测磁场变化,在灰尘、油、水等环境中具有较强的耐受性。适用于灰尘多、油多、水多等严苛环境下的应用场景。例如,碎线头多的工业缝纫机应用、切削液及水飞溅较多的加工机械应用。
另外,前面对工作原理进行说明时提到,旋转角度传感器IC和永磁体可以组装出简单的、能输出绝对角度的编码器,适用于要求小型轻量、高可靠性的应用中。例如,使用小直径电机的加工机械、对使用寿命要求高的工厂自动化(FA)设备等。
一般来讲,要求高精度、高分辨率的应用,使用光学编码器;追求环境耐受性强、小型轻量、高可靠性的应用,使用磁编码器。新款的磁编码器提高了精度和分辨率,而且可以实现离轴检测,因此,光学编码器的市场上也逐渐出现了磁编码器的应用。
总结
- 磁编码器通过检测磁场变化得出旋转位置信息,转换成电气信号输出。
- Shaft-End配置下的磁编码器由径向充磁磁铁和检测横向磁场强度的霍尔元件组成,对轴偏心的容忍度高。
- 磁编码器可用于要求环境耐受性强、小型轻量、可靠性高的应用中。
- 磁编码器能提升精度和分辨率,可实现离轴检测,逐渐出现在光学编码器的市场上。