-
製品情報

-
アプリケーション
-
サポート
-
AKM について
#05
磁気式エンコーダーの動作原理と特長
エンコーダー 基礎知識
こんにちは。エンコーダー兄妹です。わたしたちがいままでに得た知識を整理してみなさんに紹介している連載の今回は第 5 話です。これからエンコーダーを勉強したい人、自分はエンコーダーを扱っていないけど社内の他部署の人がエンコーダーを扱っているので仕事内容を知りたい人、高性能モーターを搭載した電気自動車でとうふ屋のハチロクに勝ちたい人・・・そんな人たちのお役に立てたら幸いです。
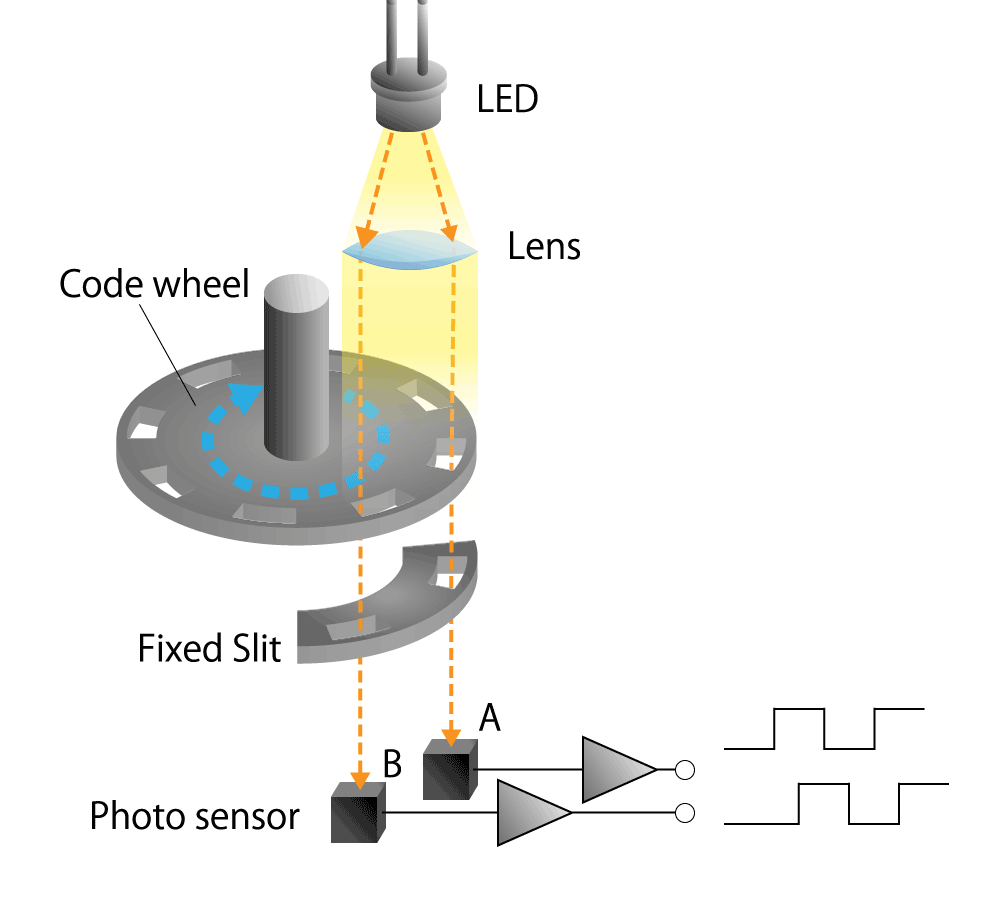
前回は光学式エンコーダーの動作原理と特長について紹介しました。今回は磁気式エンコーダーの動作原理と特長を紹介します。
まとめ
- 磁気式エンコーダーは回転位置情報を磁界の変化として検出し、電気信号に変換して出力する。
- 径方向に磁化された磁石と横方向の磁界の強さを検知するタイプのホール素子とを組み合わせた Shaft-End 配置の磁気式エンコーダーは軸ずれに強い。
- 耐環境性、小型軽量、高信頼性を重視する用途には磁気式エンコーダーが使われる。
- 精度・分解能が向上し、中空貫通軸にも対応できるため、光学式エンコーダーが占めている市場でも磁気式エンコーダーが使われ始めている。
磁気式エンコーダーの構造
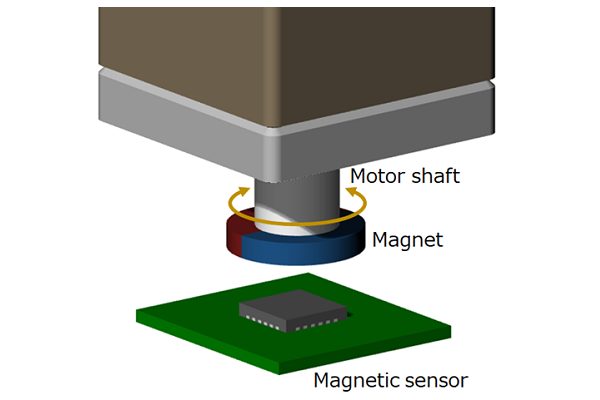 図 5-1 磁気式エンコーダーの構造模式図
図 5-1 磁気式エンコーダーの構造模式図
磁気式エンコーダーは回転位置情報を磁界の変化として検出し、電気信号に変換して出力します。もっとも簡単な磁気式エンコーダーは永久磁石と磁気センサーで構成されます。永久磁石はモーター軸などの回転体の先端に取り付けられ、磁気センサーは永久磁石が作り出す磁界を受ける位置で PCB 基板などに実装した状態で固定されます。モーター軸に取り付けられた永久磁石が回転すると磁気センサーが検知する磁界の向きが変化するのでモーター軸の回転位置・回転速度がわかります。
ここから先は、ホール素子と呼ばれる磁気センサーと永久磁石で構成される磁気式エンコーダーを使い、磁界分布の変化が角度情報に変換されるまでの動作原理を詳しく解説していきます。ホール素子とは、ホール効果という現象を利用して磁界の強さに比例した電圧を出力する磁気センサーです。
ホール素子
磁気式エンコーダーで使用されるホール素子は半導体材料で作られています。現在主に使われている半導体材料は、感度が高いインジウムアンチモン (InSb) 、温度特性が安定したガリウムヒ素 (GaAs) 、感度も温度特性もバランスの取れたインジウムヒ素 (InAs) といった化合物半導体と、IC のダイに搭載可能なシリコン (Si) があります。また、ホール素子には縦方向の磁界の強さを検知できるタイプと横方向の磁界の強さを検知できるタイプがあります。(ホール素子の詳しい解説は「磁気センサー基礎知識」に書かれているので興味がある方はそちらをご覧ください。)
永久磁石
磁気式エンコーダーで使用される永久磁石の形状は一般的には円板型 (コイン型) で、円板の径方向または面方向に磁化されています。エンコーダーとして動作するために必要な磁束密度の条件を満たしていれば、磁石素材・寸法を自由に選択できます 。一般的には、温度特性が良好なサマコバ (SmCo) 系、小型軽量化に向くネオジム (Ne-Fe-B) 系、安価なフェライト系の磁石の中から目的に応じて選びます。
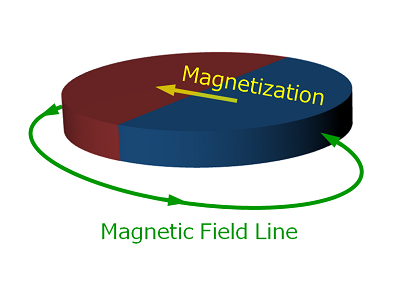 図 5-2a 径方向に磁化された磁石
図 5-2a 径方向に磁化された磁石
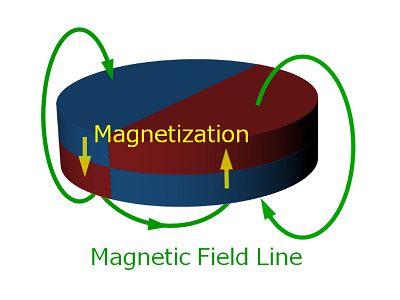 図 5-2b 面方向に磁化された磁石
図 5-2b 面方向に磁化された磁石
永久磁石とホール素子の配置
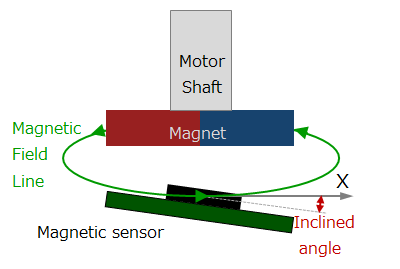
回転軸と永久磁石とホール素子の中心が同一線上に揃うのが磁気式エンコーダーの理想的な配置です 。このような配置を Shaft-End 配置 (軸端配置) と呼びます。しかし、Shaft-End 配置でも実際には“軸ずれ”と呼ばれるわずかな配置誤差があります。ホール素子が軸ずれすると検知する磁界の強さが変化するため、その結果として角度検知の精度に誤差が生じます。軸ずれを完全になくすことは非常に困難ですが、Shaft-End 配置では横方向の磁界が均一な領域にホール素子が配置されるため、横方向の磁界の強さを検知するタイプのホール素子では、軸ずれしてもホール素子に入力される磁界があまり変化しません。したがって、縦方向の磁界の強さを検知するタイプのホール素子よりも軸ずれに対する角度誤差の発生を小さくすることができます。
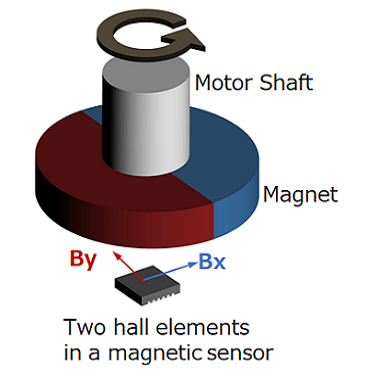
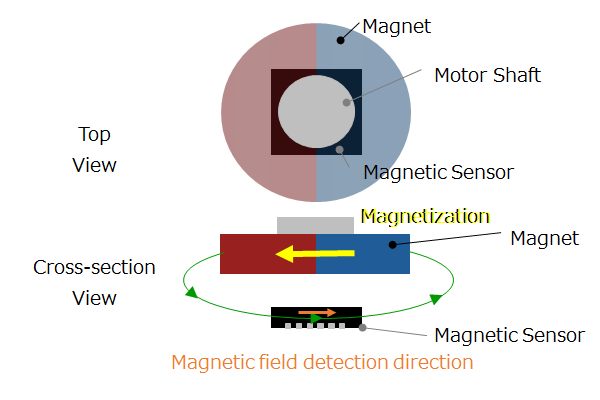 図 5-3a 径方向に磁化された磁石と横方向の 磁界の強さを検知するホール素子の組み合わせ
図 5-3a 径方向に磁化された磁石と横方向の 磁界の強さを検知するホール素子の組み合わせ
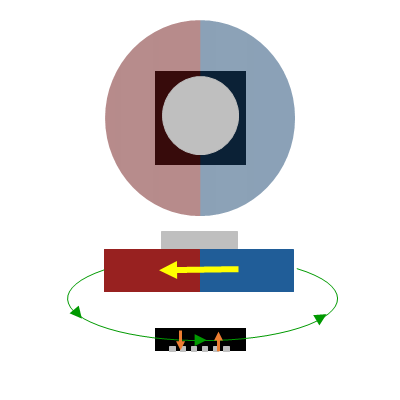 図 5-3b 径方向に磁化された磁石と縦方向の 磁界の強さを検知するホール素子の組み合わせ
図 5-3b 径方向に磁化された磁石と縦方向の 磁界の強さを検知するホール素子の組み合わせ
側面方向に漏れ出す磁界が周りの機器に悪い影響を与えるなどの理由で漏れ磁界を弱くしたい場合は面方向に磁化された永久磁石を使いますが、径方向に磁化された磁石と比べると横方向に均一な磁界の領域が狭くなるため軸ずれによる角度誤差が相対的に大きくなります 。
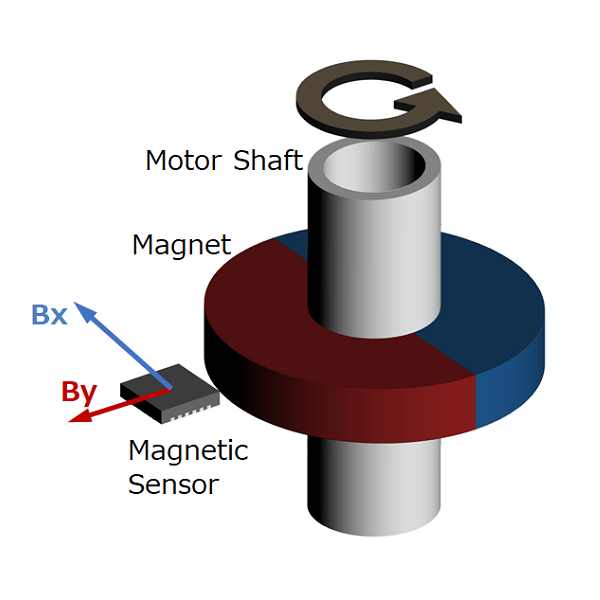
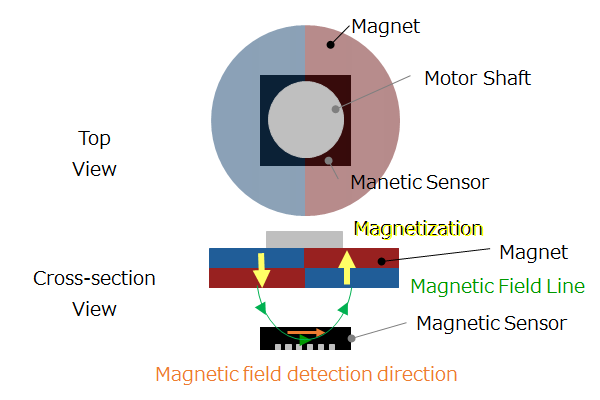 図 5-4a 面方向に磁化された磁石と横方向の磁界の強さを検知するホール素子の組み合わせ
図 5-4a 面方向に磁化された磁石と横方向の磁界の強さを検知するホール素子の組み合わせ
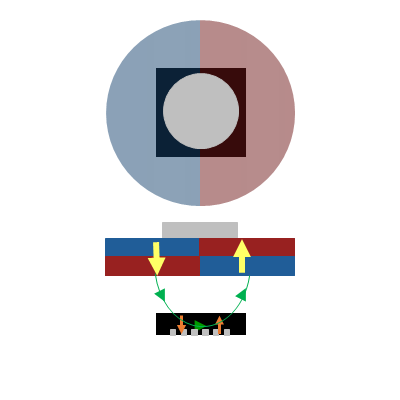 図 5-4b 面方向に磁化された磁石と縦方向の磁界の強さを検知するホール素子の組み合わせ
図 5-4b 面方向に磁化された磁石と縦方向の磁界の強さを検知するホール素子の組み合わせ
このように、Shaft-End 配置のメリットは、径方向に磁化された磁石と横方向の磁界の強さを検知するタイプのホール素子とを組み合わせることで軸ずれに強いエンコーダーを容易に実現できることです。実は Shaft-End 以外の場所にホール素子を配置する Off-Axis 配置という使い方もありますが、それについては次回以降で詳しくご紹介します。
ここから先は、径方向に磁化された磁石と横方向の磁界の強さを検知するタイプのホール素子で構成される磁気式エンコーダーを使い、動作原理を解説していきます。
5-2. 磁気式エンコーダーの動作原理
回転運動による磁界分布の変化を検知し電気信号に変換するホール素子
モーター軸が回転すると、軸の先端に取り付けられた永久磁石が作り出す磁界が回転します。このとき、回転軸の中心付近の領域では磁界の強さが一定のまま回転します。この磁界分布の変化をホール素子で検知し電気信号に変換します。ホール素子は単一方向の磁界の強さしか検知できない磁気センサーなので、回転位置を検知するためには、磁界の回転面の X 軸成分の強さ Bx を検知するためのホール素子と Y 軸成分の強さ By を検知するためのホール素子がそれぞれ必要です。
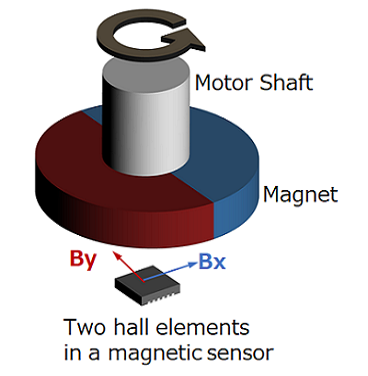 図 5-5a Shaft-End 配置の磁気式エンコーダーの構造模式図
図 5-5a Shaft-End 配置の磁気式エンコーダーの構造模式図
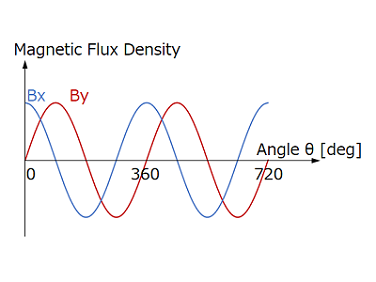 図 5-5b ホール素子が検知する磁界の強さ
図 5-5b ホール素子が検知する磁界の強さ
ホール素子の電気信号を角度情報に変換する
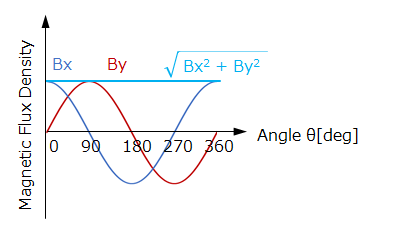 図 5-6a X 軸成分の磁界 Bx と Y 軸成分の磁界 By
図 5-6a X 軸成分の磁界 Bx と Y 軸成分の磁界 By
ホール素子で電気信号に変換された X 軸成分と Y 軸成分の磁界情報は、AD コンバーターでデジタル信号に変換されたあと演算回路に送られ、三角関数を使って角度情報に変換されます。たがいに直交する X 軸成分と Y 軸成分を合成して得られる平面図形をリサージュ図形 (またはリサージュ波形) といいますが、軸ずれがない Shaft-End 配置では磁界の強さが一定のまま回転するのでリサージュ図形がきれいな真円を描きます。このため、三角関数で変換された角度出力結果が誤差ゼロになります。また、横方向の磁界の強さを検知するタイプのホール素子が軸ずれしても入力される磁界はあまり変化しないため、角度出力結果の誤差が小さくなります。
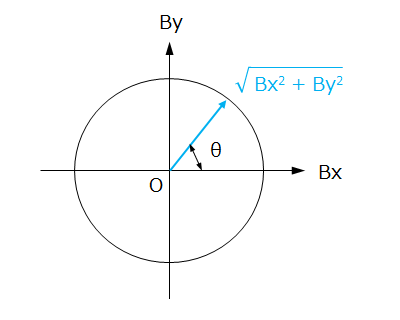 図 5-6b 磁界の強さのリサージュ図形
図 5-6b 磁界の強さのリサージュ図形
X 軸成分を Bx、Y 軸成分を By とすると、回転角度 θ は arctan(By/Bx) の計算で絶対角度として求められ、第 3 話で紹介したアブソリュート方式で出力することができます。すなわち、磁気式エンコーダーは本質的に絶対角度検知のエンコーダーです。また、絶対角度情報を A 相 B 相 Z 相の情報に変換することによって、パルス信号としてインクリメンタル方式/疑似アブソリュート方式で出力することができます。このとき、絶対角度情報の分解能が十分高ければ、360ppr、1000ppr、2500ppr、4000pprなど任意の分解能のパルス信号を出力することが可能です。
回転角センサー IC
磁気式エンコーダーに必要な構成要素である磁気センサー、AD コンバーター、演算回路をすべて内蔵した電子部品を回転角センサー IC といいます。回転角センサー IC と永久磁石という非常に簡単な構成で小型の磁気式エンコーダーを実現することができ、民生・産機・車載用途で広く使われています。
5-3. 磁気式エンコーダーの特長と主な用途
磁気式エンコーダーは磁界の変化を検出する仕組みであることから、埃・油・水などの汚染に強い耐環境性という優れた特長があります。このため、埃・油・水の多い環境で使う用途に適しています。例えば、糸くずの多い環境で使う工業用ミシンや切削油や水が飛び跳ねる環境で使う工作機械などで用いられます。
また、前述の動作原理で説明しましたが、回転角センサー IC と永久磁石という非常に簡単な構成で絶対角度を出力するエンコーダーを製造可能という特長があります。このため、小型軽量、高信頼性が求められる用途に適しています。例えば、小径モーターが使われる工作機械、耐久性が求められる工場自動化 (FA) 向け機械などで用いられます。
一般的には高精度、高分解能が要求される用途では光学式エンコーダーが使われ、耐環境性、小型軽量、高信頼性を重視する用途には磁気式エンコーダーが使われます。最新の磁気式エンコーダーは精度・分解能が向上し、中空貫通軸にも対応できるため、光学式エンコーダーが占めている市場でも磁気式エンコーダーが使われ始めています。
まとめ
- 磁気式エンコーダーは回転位置情報を磁界の変化として検出し、電気信号に変換して出力する。
- 径方向に磁化された磁石と横方向の磁界の強さを検知するタイプのホール素子とを組み合わせた Shaft-End 配置の磁気式エンコーダーは軸ずれに強い。
- 耐環境性、小型軽量、高信頼性を重視する用途には磁気式エンコーダーが使われる。
- 精度・分解能が向上し、中空貫通軸にも対応できるため、光学式エンコーダーが占めている市場でも磁気式エンコーダーが使われ始めている。
いかがでしたか?
今回は磁気式エンコーダーの動作原理と特長について紹介しました。動作原理と特長、磁気式エンコーダーが主に使われる用途をご理解いただけたと思います。
次回は磁気式エンコーダーの角度誤差について解説します。それでは、また会いましょう。