-
製品情報

-
アプリケーション
-
サポート
-
AKM について
#02
エンコーダーの種類と仕組み
エンコーダー 基礎知識
こんにちは。エンコーダー兄妹です。
「エンコーダー基礎知識」の第 2 話です。
これからエンコーダーを勉強したい人、自分はエンコーダーを扱っていないけど社内の他部署の人がエンコーダーを扱っているので仕事内容を知りたい人、モーターの力でロードバイクのケイデンスをあと 30 上げたい人・・・
そんな人たちのお役に立てたら幸いです。
まとめ
- エンコーダーは回転していることを物理的な変化量としてセンサー素子で検知し、最終的に回転・角度情報を電気信号として外部に発信する。
- エンコーダーを検出方式で分類すると、機械式・光学式・磁気式・電磁誘導式の 4 種類である。
- モーターを精度よく回転させるために必要な情報は、回転量・回転速度・回転方向・回転位置の 4 種類である。
2-1. 回転や角度を検知する仕組みはどうなっているの?
 図 1. 回転運動が回転情報に変換されるまでのプロセス
図 1. 回転運動が回転情報に変換されるまでのプロセス
第 1 話では、エンコーダーとは回転角や直線変位、速さを検出するセンサーのことです、とお話ししました。センサーとは自然界の変化を検知する素子または電子部品のことです。例えば、光センサーは光の On/Off を検知し、磁気センサーは磁界分布を検知します。
センサーの働きはこれだけではありません。検知した物理量の変化を電気信号として出力することで、初めて外部に情報を発信することができます。図 1 の様に、エンコーダーはセンサー素子から出力された電気信号を処理し、最終的に回転・角度情報をデジタルまたはアナログ電気信号として外部に発信します。
2-2. 回転するとどんな物理量が変化するの?
検知する物理量の違いはそのままセンサーの検出方式の違いとなるため、エンコーダーとしての特徴 (長所・短所) を決める重要な構成要素になります。
エンコーダーを検出方式で分類すると、下記の 4 種類になります。
機械式 (接触式)
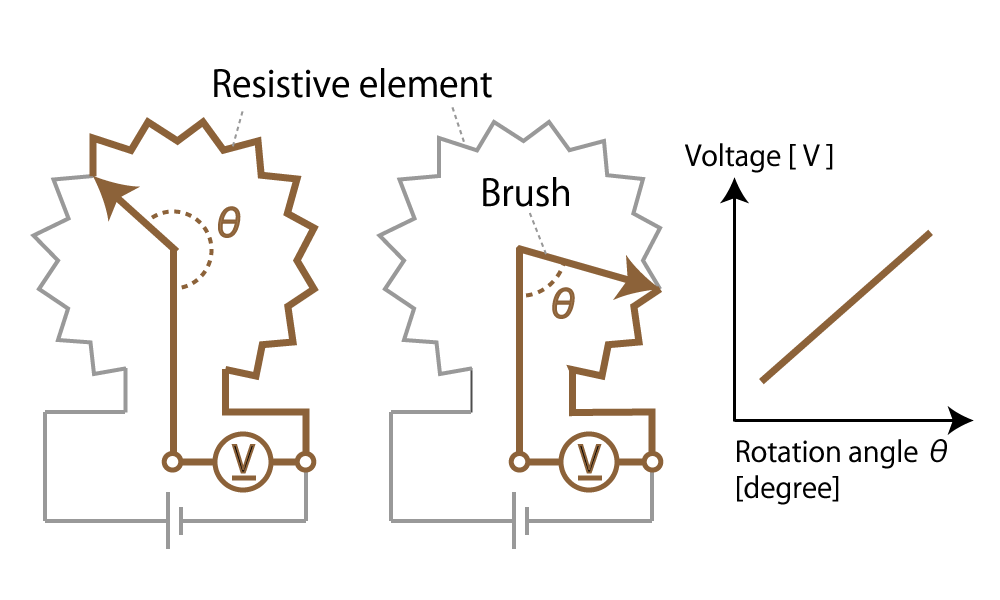 図 2. 機械式 (接触式) エンコーダーの模式図
図 2. 機械式 (接触式) エンコーダーの模式図
回転角に比例して電気抵抗が変化する可変抵抗で回転位置を検出する方式です。このような機械式のエンコーダーは一般的にはポテンショメーターと呼ばれています。
ポテンショメーターは抵抗体の上を摺動子 (しゅうどうし) が動くと、摺動子の移動距離と比例して抵抗値が変化します。
光学式
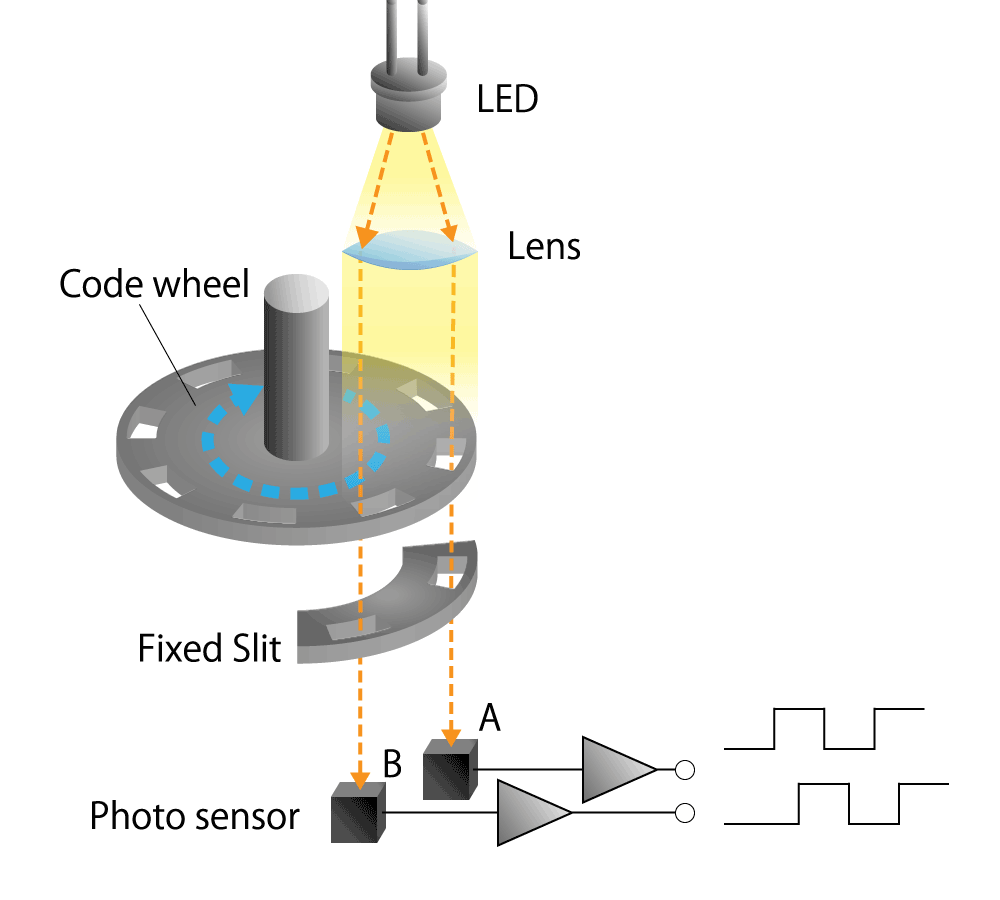
モーター軸に取り付けられたコードホイールと呼ばれる回転円盤の放射方向にスリット (穴) をあけて、スリットを光が通過するかしないかを光センサーで検出する方式です。
スリットを通過すると光パルスの信号が変化し、パルスの数を数えればモーター軸の回転量がわかります。第4話で動作原理と特長を解説します。
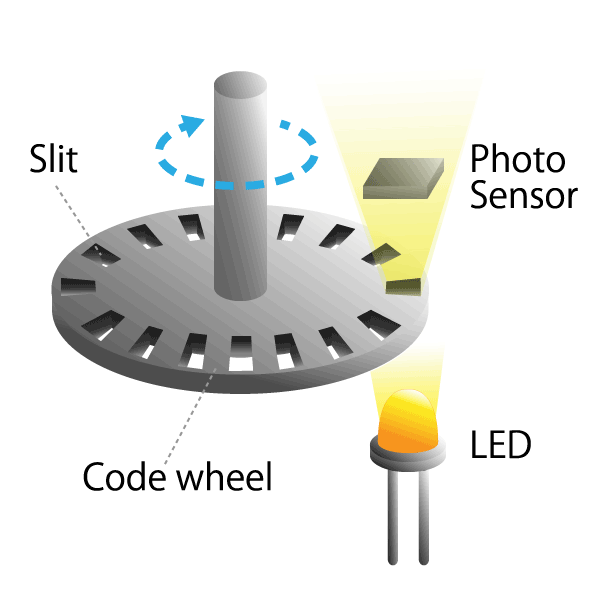 図 3. 光学式エンコーダーの模式図
図 3. 光学式エンコーダーの模式図
磁気式
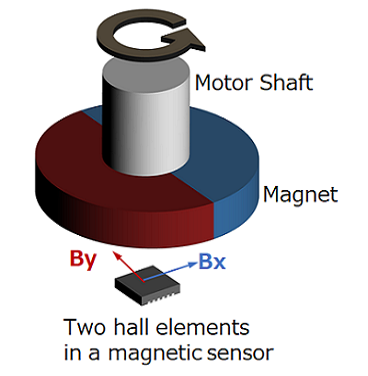
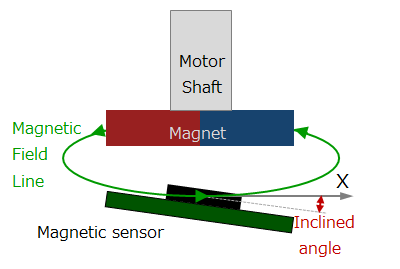
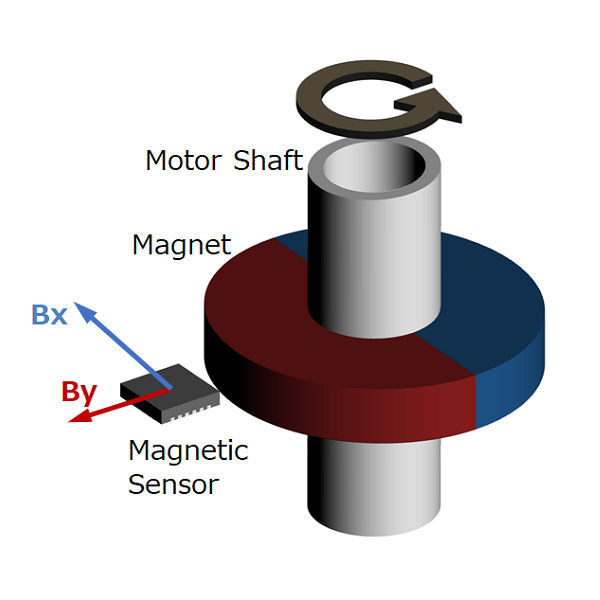
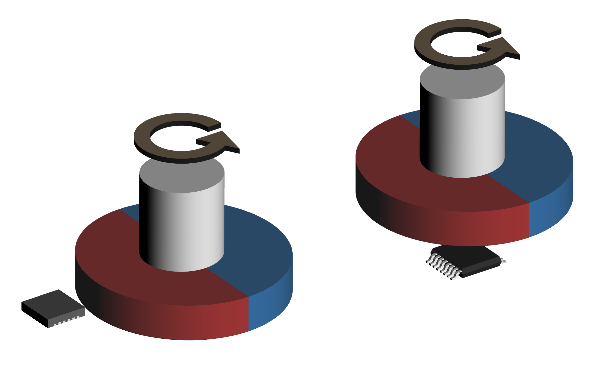 図 4. 磁気式エンコーダーの模式図
図 4. 磁気式エンコーダーの模式図
モーター軸に取り付けられた永久磁石が作り出す磁界分布の変化を磁気センサーで読み取る方式です。
モーターが回転すると永久磁石の磁界分布も変化するため、磁気センサーで検出すればモーター軸の回転位置がわかります。
第 5 話で動作原理と特長を解説します。
電磁誘導式
モーター軸に取り付けられた誘導コイル (励磁コイル) と固定コイル (検出コイル) との間で発生する磁界の変化を読み取る方式です。
基本原理は電磁誘導を利用したトランスと同じで、このようなエンコーダーはレゾルバと呼ばれています。レゾルバの回転している誘導コイルへの給電はブラシを使った接触方式のため摩耗するリスクがあり、これを改良したVR (Variable Reactance) 型レゾルバというものがあります。
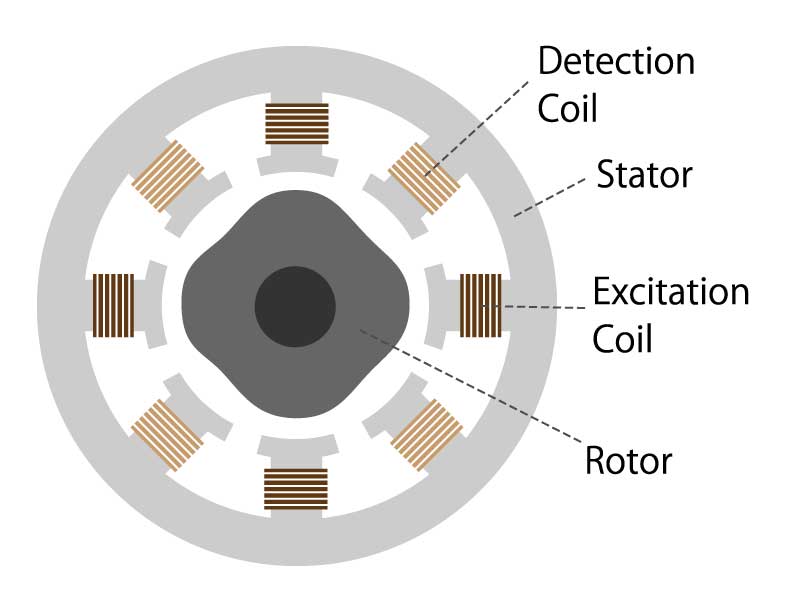 図 5. 電磁誘導式エンコーダーの模式図
図 5. 電磁誘導式エンコーダーの模式図
2-3. 回転や角度の情報ってどんな種類があるの?
そもそも、回転しているとはどういう状態なのでしょうか?モーターの例で考えてみると、停止している、時計回りに回っている、反時計回りに回っている、一定速度で回っている、加速している、減速している、などの状態があります。それらの状態を精度よく把握し、モーターを精度よく回転させるために必要な情報は、大別すると下記の4種類あります。
回転量
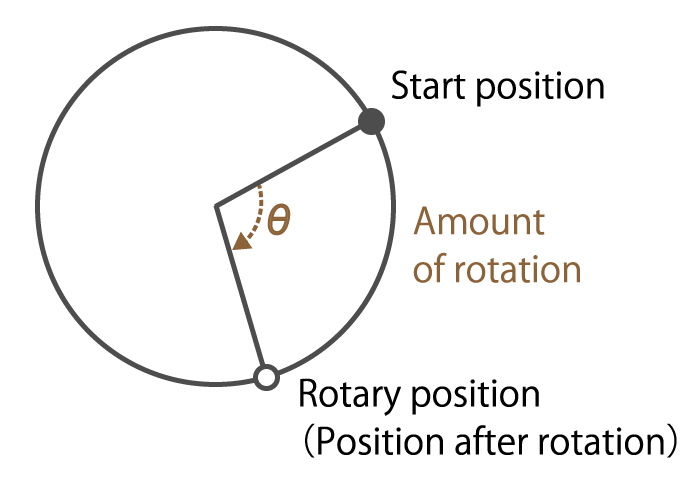 図 6. 回転量の解説
図 6. 回転量の解説
モーター軸の角度が何度動いたかという情報です。
例えばブラシレス DC モーターでは、ローターの磁極の変化を検知することによってローターの回転量を把握し、モーターを精度よく回転させることができます。
回転速度
モーターがどれだけ速く回ったかという情報です。
第 1 話でお話ししましたが、サーボモーターではブラシレス DC モーターや AC モーターの回転速度を検知し、サーボアンプが設定した回転速度になるようにフィードバック制御を行います。
回転方向
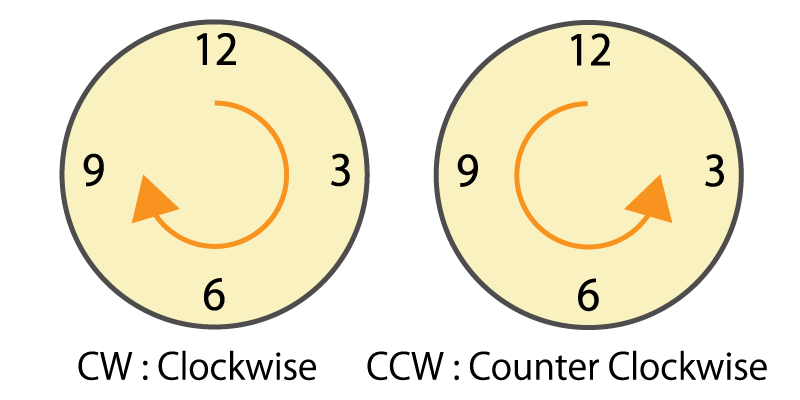
モーター軸が時計回り (CW:Clockwise) ・反時計回り (CCW:Counter Clockwise) のどちらの方向に回ったかという情報です。
モーターの回転量をエンコーダーから出力されるパルスの数で検知するシステムの場合、回転方向を認識できないと回転量を間違ってカウントしてしまいます。
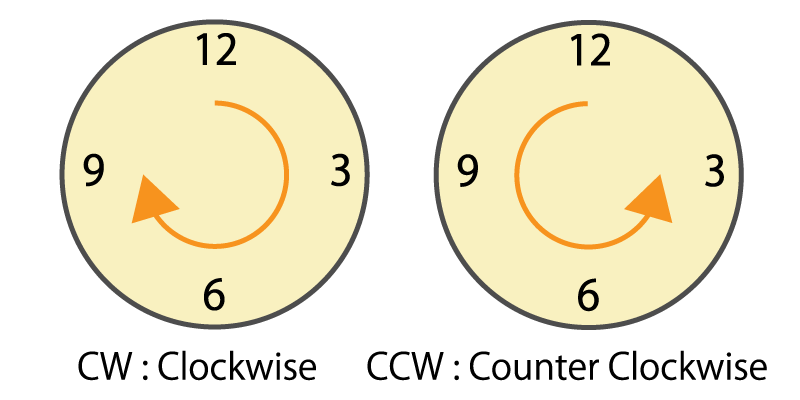 図 7. 時計回りと反時計回り
図 7. 時計回りと反時計回り
回転位置
モーター軸の角度が何度の位置にいるかという情報です。
第 1 話でお話ししましたが、サーボモーターやステッピングサーボモーターではエンコーダーを用いて回転角度を検出し、目標の回転角まで移動したかどうかを判断しながら目標の回転角になるようにフィードバック制御します。それによって、高い精度で位置決め制御を行います。
まとめ
- エンコーダーは回転していることを物理的な変化量としてセンサー素子で検知し、最終的に回転・角度情報を電気信号として外部に発信する。
- エンコーダーを検出方式で分類すると、機械式・光学式・磁気式・電磁誘導式の 4 種類である。
- モーターを精度よく回転させるために必要な情報は、回転量・回転速度・回転方向・回転位置の 4 種類である。
いかがでしたか?
今回はエンコーダーの種類と仕組みについて紹介しました。モーターを精度よく回転させるために必要な 4 つの回転情報と、検出する物理量の違いによって動作原理が異なる4種類のエンコーダーがあることがご理解いただけたと思います。
次回はインクリメンタル方式とアブソリュート方式について解説します。
コラム1. 直線変位を検出するエンコーダー
フライス盤、ボール盤など位置決め精度が要求される工作機械では直線変位を検出するエンコーダーが使われています。直線変位を検出する方法には下記の 2 種類があります。
直進型 (並進型) のエンコーダーであるリニアエンコーダーで直線変位を検出する方法
リニアエンコーダーは物差しとなるスケール (目盛) と、位置情報を検出するヘッド (検出器) で構成されます。リニアスケールとも呼ばれます。検出方式はロータリーエンコーダー同様、光の反射を用いる光学式と磁気を用いる磁気式があります。
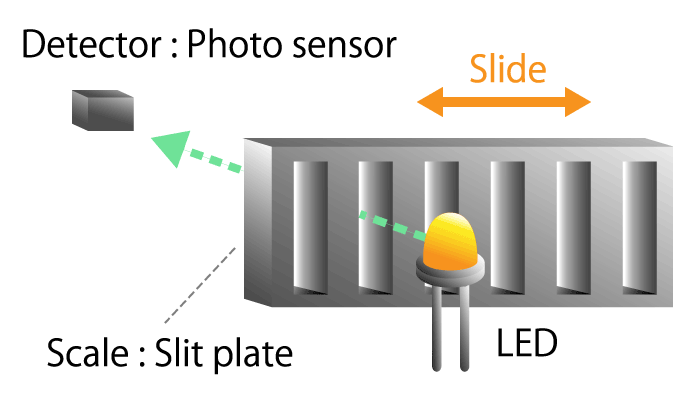 図 8a. 光学式リニアエンコーダー
図 8a. 光学式リニアエンコーダー
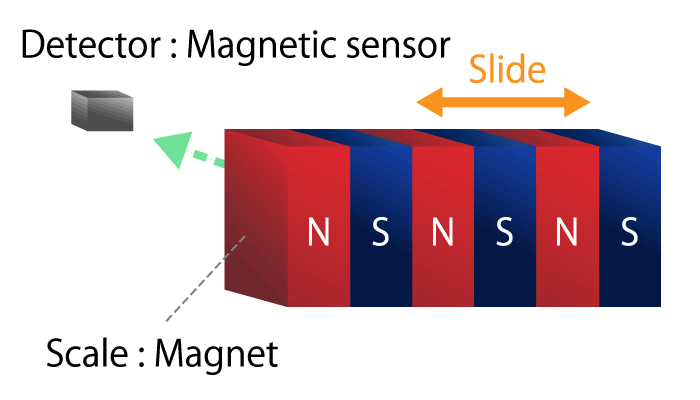 図 8b. 磁気式リニアエンコーダー
図 8b. 磁気式リニアエンコーダー
回転運動を直線運動に変換し、ロータリーエンコーダーで回転変位を検出する方法
ねじの回転運動をナットの直線運動に変換させる機構をねじ送り機構と呼びます。代表的なものはボールねじで、ねじ軸とナットの間に鋼球 (ボール) を入れ、ねじ軸を回転させるとボールの転がり運動でナットが直線上を移動します。ねじ軸の回転位置と回転数の情報を用いてボールねじの直線変位を検出することができます。
ボールねじは高い位置決め精度を実現できるため、工作機械や計測器、コピー機、プリンターで用いられています。
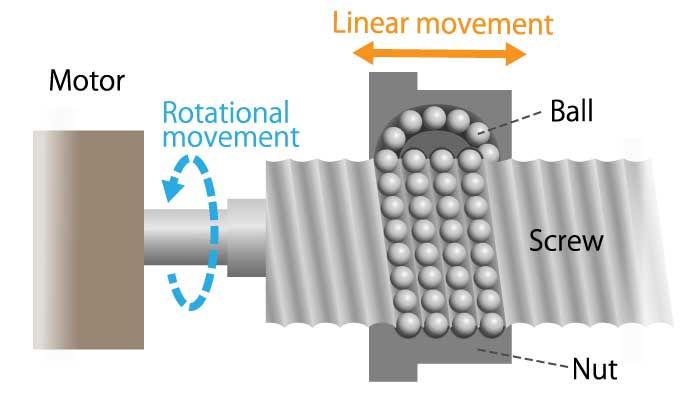 図 9. ねじ送り機構の模式図
図 9. ねじ送り機構の模式図