-
製品情報

-
アプリケーション
-
サポート
-
AKM について
#07
Off-Axis 配置の磁気式エンコーダー
エンコーダー 基礎知識
こんにちは。エンコーダー兄妹です。わたしたちがいままでに得た知識を整理してみなさんに紹介している連載の今回は第 7 話です。これからエンコーダーを勉強したい人、自分はエンコーダーを扱っていないけど社内の他部署の人がエンコーダーを扱っているので仕事内容を知りたい人、チタタプのオハウにはオソマが合うんじゃないのと思っている不死身の人・・・そんな人たちのお役に立てたら幸いです。
前回は磁気式エンコーダーの角度誤差について解説しました。今回は Off-Axis 配置の磁気式エンコーダーを紹介します。
まとめ
- Off-Axis 配置の磁気式エンコーダーは回転軸の両軸先端をフリーにでき、エンコーダー全体を薄型化でき、中空貫通軸にも対応できる。
- Off-Axis 配置ではリサージュ図形がかなり歪んだ楕円を描くため、必ず補正を行う。
- 補正演算を行う前のキャリブレーション作業では回転角度 θ にどれだけ角度誤差が含まれているかを知るため真の角度情報 (=神様情報、リファレンス) が必要である。
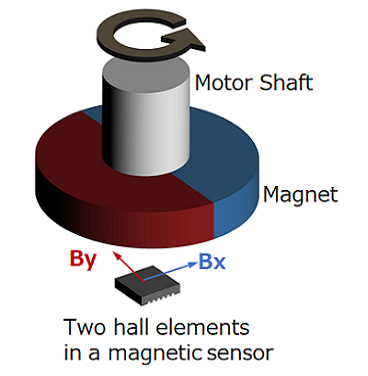
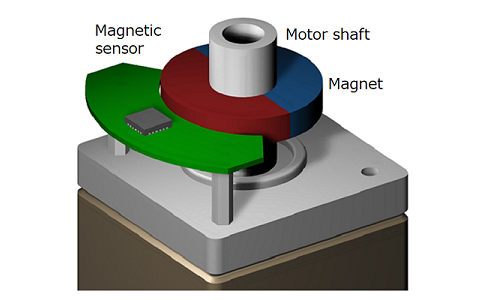 図 7-1 Off-Axis 配置の磁気式エンコーダーの構造模式図
図 7-1 Off-Axis 配置の磁気式エンコーダーの構造模式図
第 5 話の磁気式エンコーダーの動作原理と特長では回転軸と永久磁石とホール素子の中心が同一線上に揃う Shaft-End 配置が磁気式エンコーダーの理想的な配置だと説明しました。理論上はリサージュ図形が真円になり角度検知誤差がゼロになるためです。一方、Shaft-End 配置では回転軸の中心という一等地をエンコーダーが占有する構造になるため、回転軸の先端を他の用途に使用できないという機構上のデメリットがあります。この問題を回避するため、エンコーダーをあえて回転軸の中心からずらして配置し回転軸の先端をフリーにする、という使い方があります。このような配置のことを Off-Axis 配置といいます。
7-1. Off-Axis 配置の磁気式エンコーダーの構造
ここから先は、ホール素子と呼ばれる磁気センサーと永久磁石で構成される磁気式エンコーダーを使い、Off-Axis 配置で磁界分布の変化が角度情報に変換されるまでの動作原理を詳しく解説していきます。ホール素子とは、ホール効果という現象を利用して磁界の強さに比例した電圧を出力する磁気センサーです。
(ホール素子の詳しい解説は「磁気センサー 基礎知識」に書かれているので興味がある方はそちらをご覧ください。)
ホール素子
磁気式エンコーダーで使用されるホール素子は第 5 話でも紹介したように、インジウムアンチモン (InSb) 、ガリウムヒ素 (GaAs) 、インジウムヒ素 (InAs) 、シリコン (Si) などの半導体材料で作られています。 また、ホール素子には縦方向の磁界の強さを検知できるタイプと横方向の磁界の強さを検知できるタイプがありますが、Off-Axis 配置では横方向の磁界の向きを検知できるタイプを使用します。
永久磁石
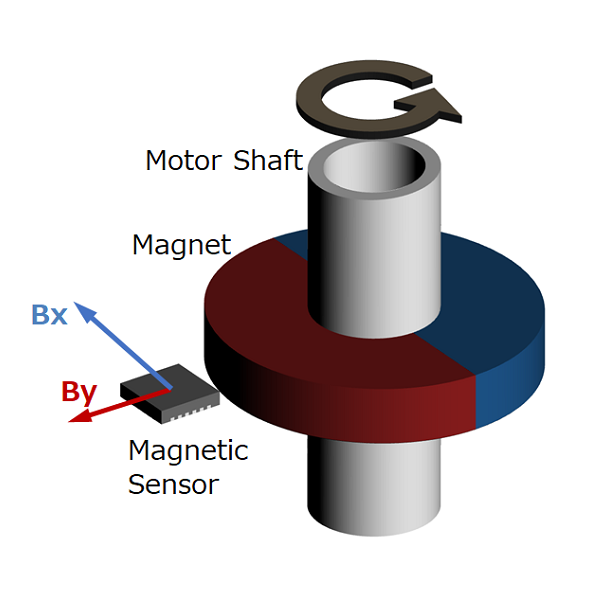
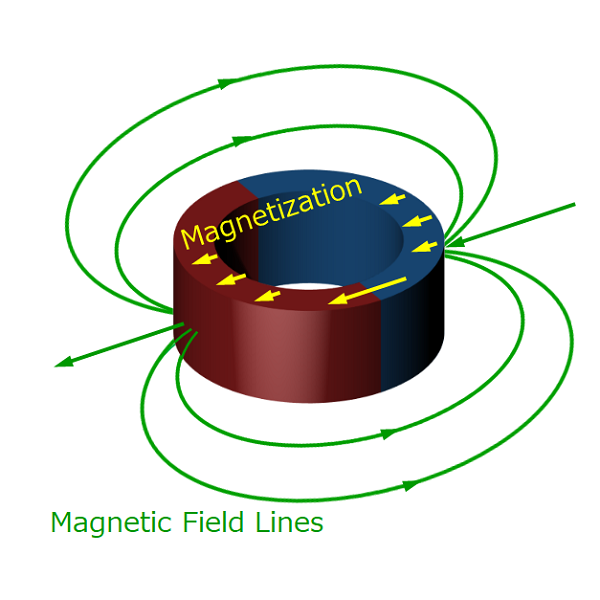 図 7-2 リング型 (ドーナツ型) で径方向に磁化された永久磁石
図 7-2 リング型 (ドーナツ型) で径方向に磁化された永久磁石
磁気式エンコーダーで使用される永久磁石の形状は一般的には円板型 (コイン型) で、円板の径方向または面方向に磁化されています。エンコーダーとして動作するために必要な磁束密度の条件を満たしていれば、磁石素材・寸法を自由に選択できます 。一般的には、温度特性が良好なサマコバ (SmCo) 系、小型軽量化に向くネオジム (Ne-Fe-B) 系、安価なフェライト系の磁石の中から目的に応じて選びます。
永久磁石とホール素子の配置
永久磁石はリングの穴に回転軸を貫通させるように配置します。ホール素子を回転軸の中心から意図的にずらしたものはすべて Off-Axis 配置になりますが、ここでは横方向の磁界の強さを検知するタイプのホール素子をリング磁石の横に配置する例を使って説明します。Off-Axis 配置による機構上のメリットは回転軸の先端部をフリーにできることだけでなく、エンコーダー全体を薄型化できること、回転軸を中空シャフトにして内部に切削油やケーブルを通して省スペース化できること、もあげられます。
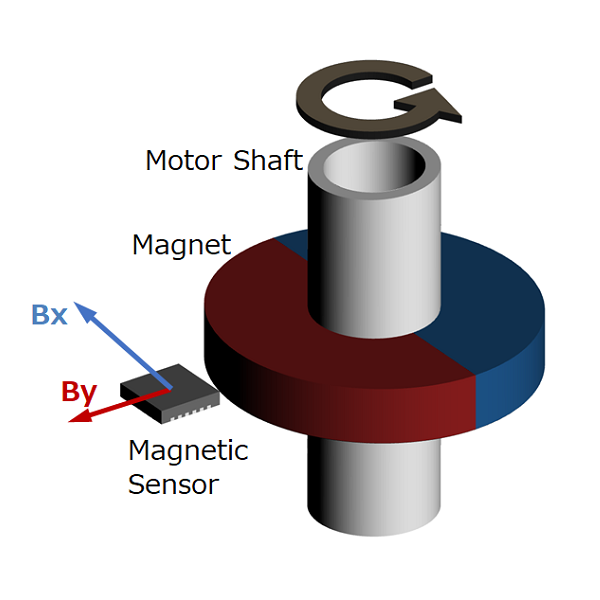 図 7-3 Off-Axis配置の磁気式エンコーダー
図 7-3 Off-Axis配置の磁気式エンコーダー
7-2. Off-Axis 配置の磁気式エンコーダーの動作原理
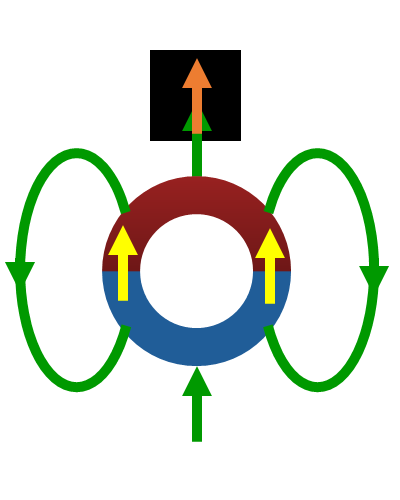
回転運動による磁界分布の変化
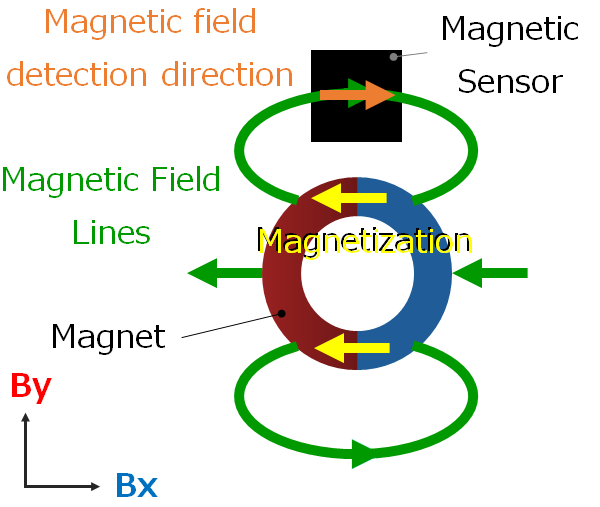
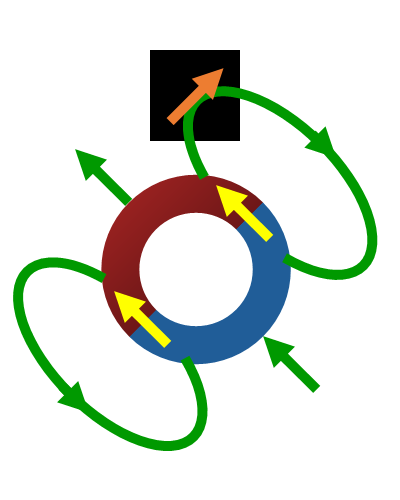
モーター軸が回転すると、軸の先端に取り付けられた永久磁石が作り出す磁界が回転します。このとき、回転軸の中心付近の領域では磁界の強さが一定のまま回転します。この磁界分布の変化をホール素子で検知し電気信号に変換します。ホール素子は単一方向の磁界の強さしか検知できない磁気センサーなので、回転位置を検知するためには、磁界の回転面の X 軸成分の強さ Bx を検知するためのホール素子と Y 軸成分の強さ By を検知するためのホール素子がそれぞれ必要です。
 θ = 0°
θ = 0°
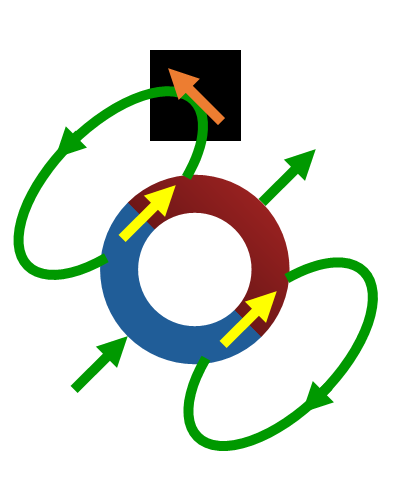
 θ = 45°
θ = 45°
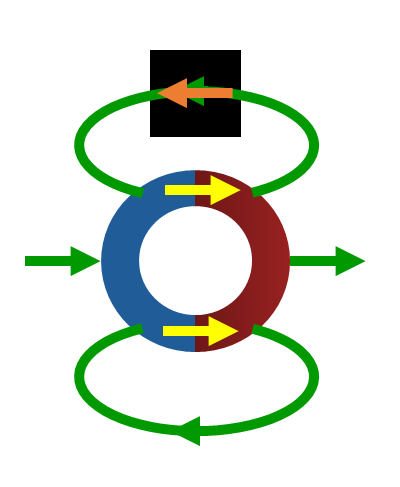
 θ = 90°
θ = 90°
 θ = 135°
θ = 135°
 θ = 180°
θ = 180°
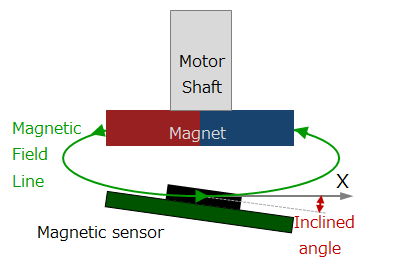
図 7-4 Off-Axis 配置でホール素子に入力される磁界
ホール素子の電気信号を角度情報に変換する
ホール素子で電気信号に変換された X 軸成分と Y 軸成分の磁界情報は、AD コンバーターでデジタル信号に変換されたあと演算回路に送られ、三角関数を使って角度情報に変換されます。たがいに直交する X 軸成分と Y 軸成分を合成して得られる平面図形をリサージュ図形といいますが、Off-Axis 配置ではリサージュ図形がかなり歪んだ楕円を描きます。リング磁石の横では磁界の強さと方向が同時に変化しながら回転することと、リング磁石の回転角度とホール素子に入力される磁界の向きが一致しないことが理由です。X 軸成分を Bx、Y 軸成分を By とすると、回転角度 θ は arctan (By/Bx) の計算で絶対角度として求められますが、リサージュ図形が歪んでいるため回転角度 θ には大きな角度誤差が含まれています。
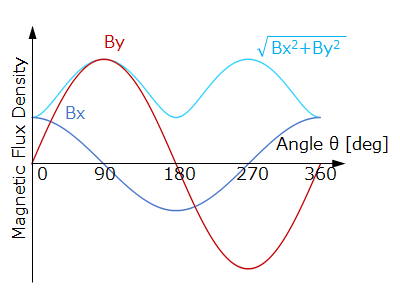 図 7-5a Off-Axis 配置での X 軸方向の磁界 Bx、Y 軸方向の磁界 By
図 7-5a Off-Axis 配置での X 軸方向の磁界 Bx、Y 軸方向の磁界 By
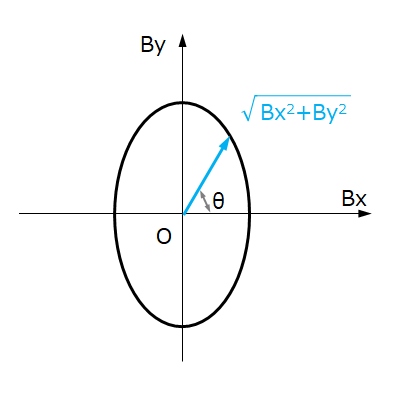 図 7-5b Off-Axis 配置でのリサージュ図形
図 7-5b Off-Axis 配置でのリサージュ図形
ホール素子の角度情報を補正する
回転角度 θ に大きな角度誤差が含まれているのは具合が悪いので Off-Axis 配置では必ず補正を行います。補正方法は大まかにいえば 2 通りあります。一つはあらかじめ回転角度 θ と真の角度のテーブルを作っておいて、テーブル情報を参照しながら線形補完を行う方法です。
もう一つはあらかじめ回転角度 θ に含まれる誤差成分の情報から補正用のパラメータを算出しておいて、リサージュ図形が真円になるように補正を行うことで角度誤差を打ち消す方法です。
どちらの方法にも共通していることは、補正演算を行う前のキャリブレーション作業では回転角度 θ にどれだけ角度誤差が含まれているかを知るため真の角度情報 (=神様情報、リファレンス) が必要だということです。一般的には構成された別のエンコーダーまたはステッピングモーターの指示角情報をリファレンス用として使います。
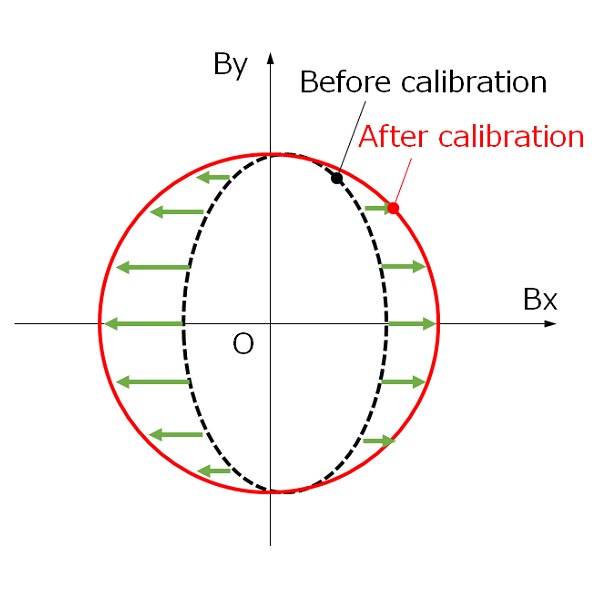 図 7-6 リサージュ図形が真円になるように補正を行う
図 7-6 リサージュ図形が真円になるように補正を行う
7-3. Off-Axis 配置の磁気式エンコーダーの特長と主な用途
磁気式エンコーダーは磁界の変化を検出する仕組みであることから、埃・油・水などの汚染に強い耐環境性という優れた特長があります。このため、ちりやほこりの多い環境で使う用途に適しています。さらに Off-Axis 配置による機構上のメリットは回転軸の先端部をフリーにできることから、工業用ミシンのメインモーターや電磁ブレーキ付きモーターなどで用いられます。また、回転軸を中空シャフトにして内部に切削油やケーブルを通す用途に適しているため、工作機械のスピンドルモーターやロボットアームで用いられます。
まとめ
- Off-Axis 配置の磁気式エンコーダーは回転軸の両軸先端をフリーにでき、エンコーダー全体を薄型化でき、中空貫通軸にも対応できる。
- Off-Axis 配置ではリサージュ図形がかなり歪んだ楕円を描くため、必ず補正を行う。
- 補正演算を行う前のキャリブレーション作業では回転角度 θ にどれだけ角度誤差が含まれているかを知るため真の角度情報 (=神様情報、リファレンス) が必要である。
いかがでしたか?
今回は Off-Axis 配置の磁気式エンコーダーの動作原理と特長について紹介しました。動作原理と特長、Off-Axis 配置が主に使われる用途をご理解いただけたと思います。
コラム2. 外乱磁界の見える化
磁気式エンコーダーは、Shaft-End 配置ではリサージュ図形が真円のとき角度誤差はゼロです。Off-Axis 配置ではリサージュ図形が真円になるよう補正を行うことで高い角度精度を実現できます。一方、第 6 話で説明しましたが、外乱磁界などの影響を受けてリサージュ図形が真円でなくなると角度誤差を生じます。磁気式エンコーダーのこの性質を利用すると、リサージュ図形の真円からの変動量をモニターすることによってエンコーダーの入力磁界の正常/異常を判別できます。つまり、外乱磁界の見える化です。例えば、リサージュ図形の変動量がある閾値を超えたときにアラームを発報するようプログラムしておけば、システムの予知保全として利用することができます。