-
製品情報

-
アプリケーション
-
サポート
-
AKM について
#01
エンコーダーの役割
エンコーダー 基礎知識
こんにちは。エンコーダー兄妹です。
「エンコーダー基礎知識」の第 1 話です。
これからエンコーダーを勉強したい人、自分はエンコーダーを扱っていないけど、社内の他部署の人がエンコーダーを扱っているので仕事内容を知りたい人、エンコーダーの開発競争で武功を上げて、いつかは天下の大将軍になりたい人・・・
そんな人たちのお役に立てたら幸いです。
まとめ
- エンコーダーとは回転角や直線変位を検出するセンサーのことである。
- エンコーダーは、高い精度で迅速に動作させる必要がある装置で使われる。
- エンコーダーを使いモーターの速さと回転角を検出しながら制御する方法をフィードバック制御という。
1-1. 回転量や回転速度を測りたい
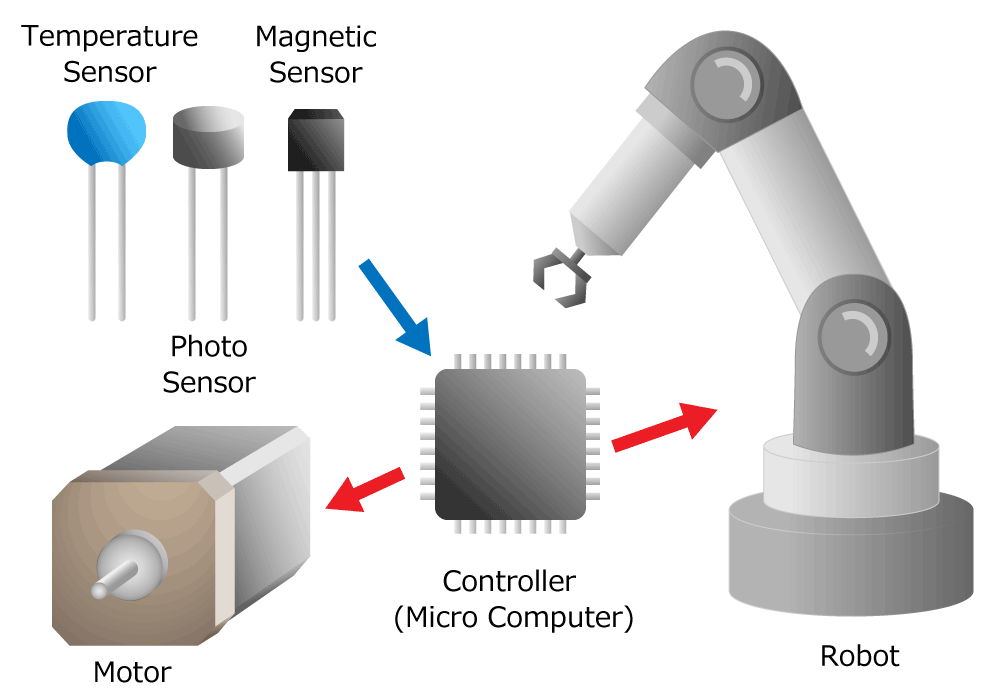 図 1. 様々なものを動かしたり制御するのにセンサーは不可欠である
図 1. 様々なものを動かしたり制御するのにセンサーは不可欠である
これらの機器を精度よく迅速に制御するためには、動きや状態を検知することが欠かせません。そこで、回転角度や移動距離、また回転や移動の速さを検知したいときに使われるのが、エンコーダーと呼ばれる電子部品です。
では、エンコーダーとは一体なんなのでしょうか?
1-2. エンコーダーってなに?
エンコーダーとは、回転角や直線変位を符号化 (encode) するセンサーのことです。エンコーダーという名前を初めて聞いた時、ほとんどの人が「回転」と結びつかないと思いますが、英語の encode からエンコーダーという名前がついたというわけです。
回転型の (回転を検知する) エンコーダーはロータリーエンコーダーといい、直線型の (直線変位を検知する) エンコーダーをリニアエンコーダーといいます。
実際には回転型の方が圧倒的に多く使われるため、単にエンコーダーという時にはロータリーエンコーダーを指すことが多いです。本連載でも基本的にはロータリーエンコーダーについて解説していきます。
1-3. エンコーダーはどこで使われている?
冒頭でも紹介しましたが、エンコーダーは、高い精度で迅速に動作させる必要がある装置で使われています。具体的に言えば、モーターで動いている装置です。例えば、工場で使われている組み立てロボット、溶接ロボット、無人搬送機、マシニングセンターなどの産業用ロボットで、エンコーダーが広く使われています。
とはいえ、産業用ロボットがばりばり働いている最新の工場なんて、ほとんどの人は見たことないですよね。そこで、以下では、エンコーダーがどんなところに使われているのかを具体的に掘り下げながら紹介していきます。
工場の自動化 (スマート工場)
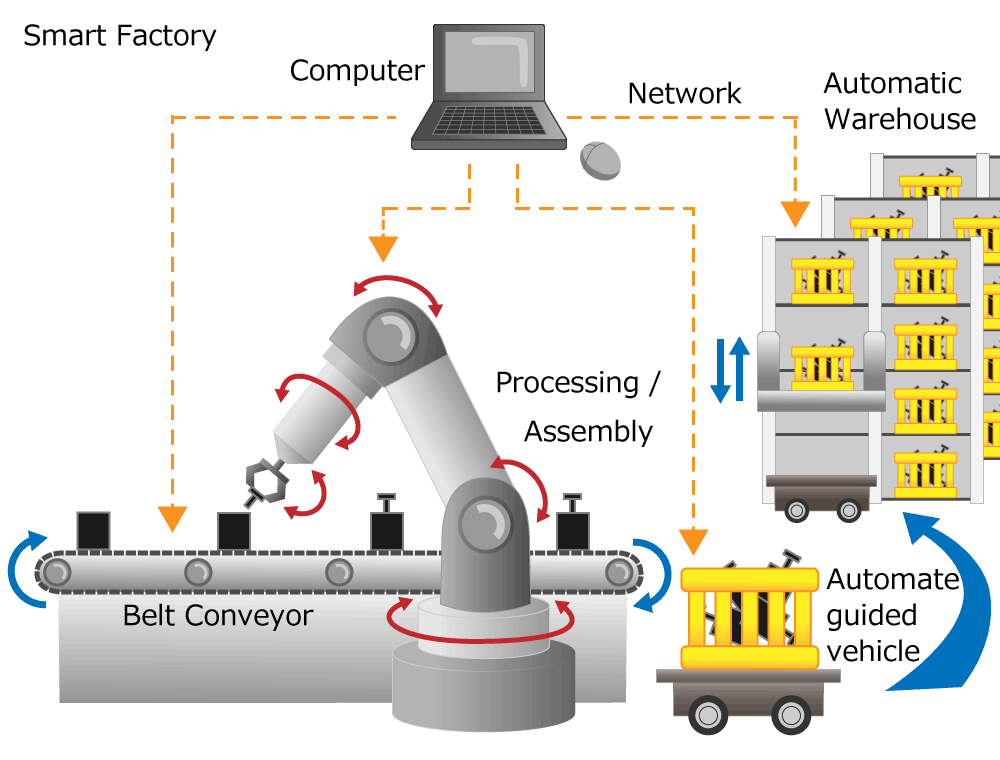 図 2. スマート工場の様子
図 2. スマート工場の様子
電化製品や自動車を生産する工場ではさまざまな生産設備が使われています。金属で部品をつくる工作機械はコンピューターで制御され、1 台の機械で平面を削ったり、孔をあけたり、溝を削ったりとさまざまな加工ができます。このような工作機械はマシニングセンターと呼ばれています。できあがった部品は組み立て工場に送られ、組み立て専用機やアーム型ロボットなどの産業用ロボットによって自動的に組み立てられます。
最新の工場では設計、部品の加工、保管・管理、搬送、組み立てとすべての製造工程においてコンピューターとネットワークが活用されていて、自動化が進んでいます。この“工場をつなぐ”という考え方はインダストリー 4.0 と呼ばれ、このような工場はスマート工場と呼ばれています。
産業用ロボット
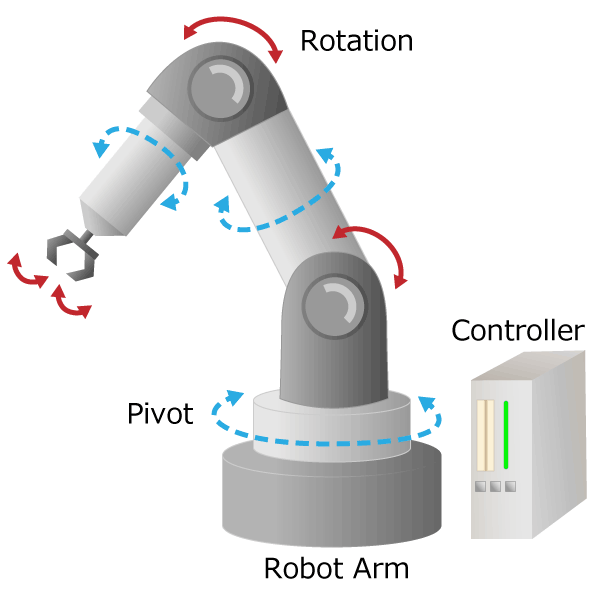
産業用ロボットは、きつく危険を伴う大変な仕事から人間を解放し、工場の生産性を上げ、製品の品質も安定させています。産業用ロボットとして一番広く使われ、かつ実用性が高いのは、人間の首・肩・腰・・・ではなく、肩・ひじ・手首に相当する複数の関節 (ジョイント) を持ち、旋回 (ピボット) 、回転 (ローテーション)、伸縮 (スライド) の動きをして人間の腕のように動作する多関節ロボットです。コントローラーから入力された信号をアクチュエーターによって動きに変換し、ロボットを細かく動かします。
 図 3. 産業用ロボットの模式図
図 3. 産業用ロボットの模式図
人間の肩から手首までの「腕」に相当する部分をマニピュレーターと呼び、人間の手首から先の「手」に相当する部分はエンドエフェクタと呼びます。産業用ロボットではエンドエフェクタを変えることで、物体をつかむだけでなく、塗装作業や溶接作業に対応できるようになっています。このような多関節ロボットを実際に見てみたい人は、ロボットや工作機械の展示会に行くと、いろいろな会社から展示されているものを見ることができます。
アクチュエーター
ロボットのアクチュエーターとしては、小型化しやすく高精度であることからモーターが使われます。実際には、モーターの出力軸に自転車の変速機 (ギア) と同じ働きをする減速機を一体化することで、モーターの速さを減少させて旋回・回転するときの回転力 (トルク) を大きくしたアクチュエーターや、ねじによりモーターの回転運動を直線の往復運動に変え運動方向に大きな力を出せるようにした電動スライダーが使われます。これらもモーターやロボットの展示会で実物を見ることができます。
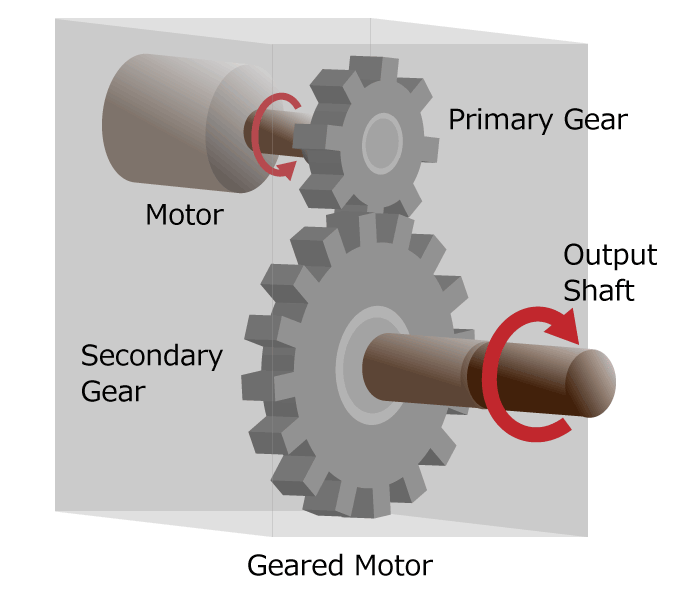 図 4a. 減速機の模式図
図 4a. 減速機の模式図
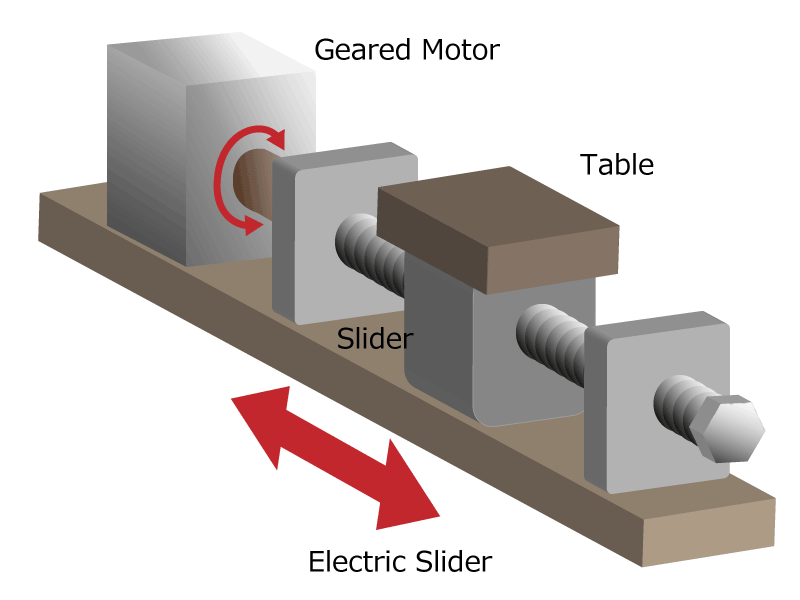 図 4b. スライダーの模式図
図 4b. スライダーの模式図
サーボモーター
モーターにはいろいろな種類があるのでわかりにくいですね。ここではエンコーダーが使われているモーターに絞り込んで紹介します。
連続的な回転運動や直線運動の速さを一定に保ったり、1 回の制御の回転角・移動距離を正確に制御するしくみをサーボ機構といい、機器をそのように制御するために使われているモーターをサーボモーターといいます。サーボモーターはブラシレス DC モーターまたは AC モーター、エンコーダー、サーボアンプ (ドライバーとも呼ばれます) の3点セットで構成されています。
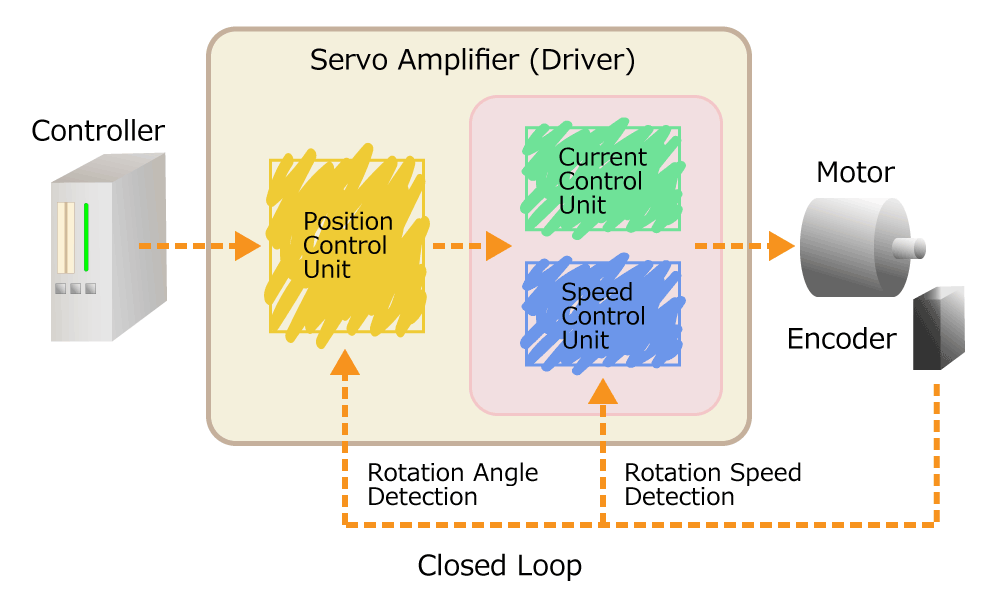 図 5. サーボモーターの構成概念図
図 5. サーボモーターの構成概念図
ブラシレス DC モーターや AC モーターの回転の速さを一定にするためには、エンコーダーを用いて回転速度を検出します。設定した回転速度より遅ければモーターを速く回すように、回転速度が速すぎればモーターの回転を遅くするようにサーボアンプが制御します。また、モーターの回転角度を正確に制御するためには、エンコーダーを用いて回転角度を検出します。目標の回転角まで移動したかどうかを判断しながら、目標の回転角になるように制御します。このように、エンコーダーを使いモーターの速さと回転角を検出しながら制御する方法をフィードバック制御 (クローズドループ方式) といいます。
ステッピングモーター
もう一つ、モーターの例を紹介します。ステッピングモーターは、1パルスの信号を入力したときに、一定の角度だけ回転するモーターです。ステッピングモーターでは、モーターに加えるパルス信号の数とパルス間の間隔でモーターの回転角と速さが決まるため、フィードバックしない方式 (オープンループ方式) でも使われます。この方法はエンコーダーを使わないためシステムが簡略化できるのが特徴です。
ただし、ステッピングモーターは脱調が発生しないように常に最大電流を流しているため、効率が悪くなってしまうという弱点があります。そこで、エンコーダーを使って指示通りに回転しているかどうかを確認しフィードバック制御を行うことで、モーターに最大電流を流し続ける必要がなくなり、システムを低消費化することができます。
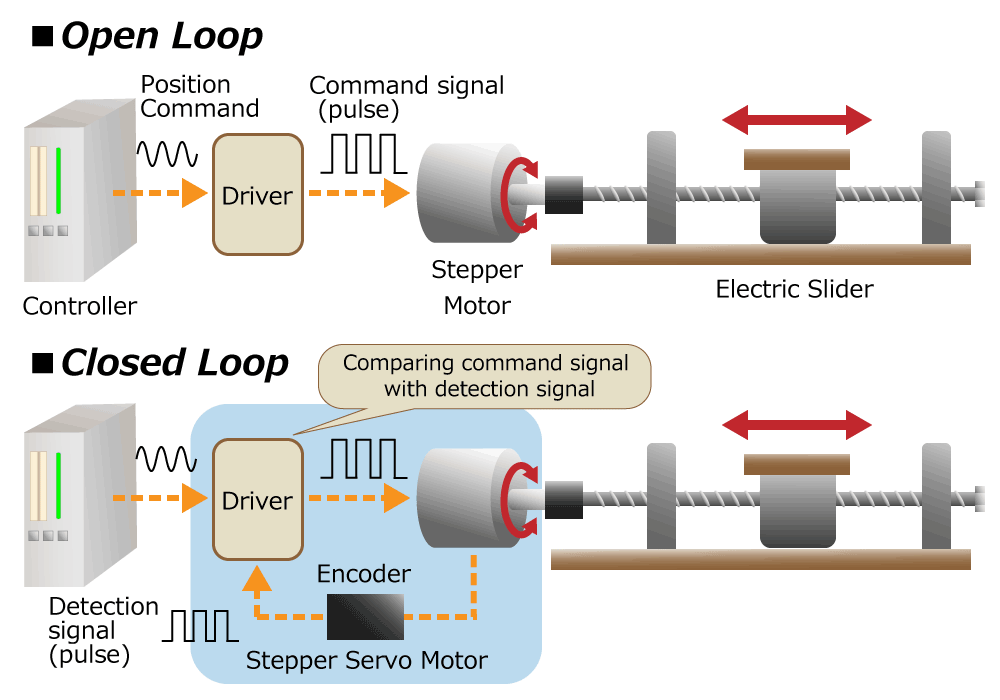 図 6. ステッピングモーターの使用例
図 6. ステッピングモーターの使用例
また、エンコーダーで負荷状態を把握することによってモーターが脱調しない範囲でアクチュエーターの動作速度を最大限に高速化させて、作業の生産性を高めることができます。このような使い方をするステッピングモーターをステッピングサーボモーターと呼ぶことがあります。
まとめ
- エンコーダーとは回転角や直線変位を検出するセンサーのことである。
- エンコーダーは、高い精度で迅速に動作させる必要がある装置で使われる。
- エンコーダーを使いモーターの速さと回転角を検出しながら制御する方法をフィードバック制御という。
いかがでしたか?
今回はエンコーダーの役割とエンコーダーがどこで使われているのかについて紹介しました。
エンコーダーが広く使われていることがご理解いただけたと思います。
次回はエンコーダーの仕組みについて解説します。