-
製品情報

-
アプリケーション
-
サポート
-
AKM について
回転角センサーの用語解説
回転角センサー
AKM の回転角センサー IC でよく使われる言葉の定義
AKM の回転角センサー IC の技術資料で、よく使われる用語について解説します。
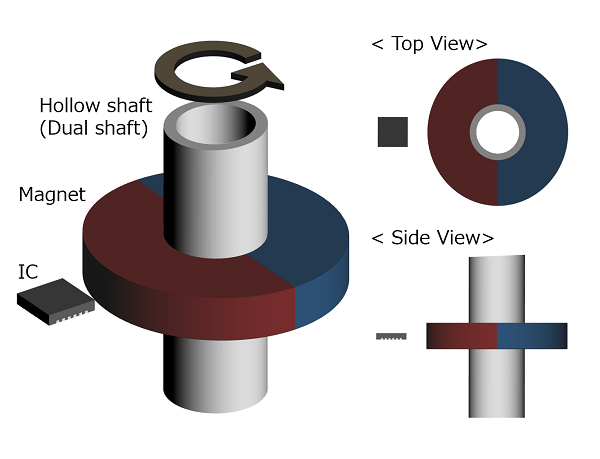
図のように、Off-Axis 配置はセンサーが回転軸上に位置しない配置です。回転軸が自由に使用できるので、両軸モーターや中空軸モーターにもご使用頂けます。
* AK7455は Off-Axis 配置に対応しています。
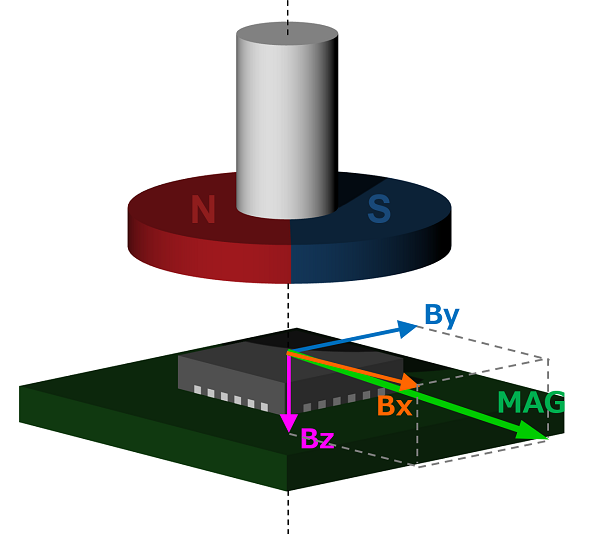
図のように磁石中心とセンサー中心が回転軸上に一直線に並んだ配置を Shaft-End 配置と呼びます。
* Shaft-End 配置で軸ずれが無い場合、Bz = 0
磁場を検出する部分です。センサーと呼ぶこともあります。 (磁石選定ガイドラインでは、感磁面のことを“センサー”と呼んでいます)
感磁面の位置は製品ごとで異なり、各データシートに記載されています。
 感磁面
感磁面
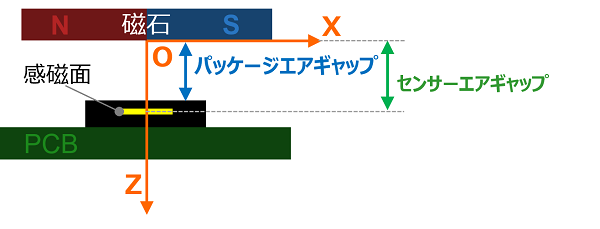
回転角度センサー IC では、磁石表面からセンサー (感磁面) までの距離をセンサーエアギャップ、磁石表面から IC パッケージ表面 (印字面) までの距離をパッケージエアギャップと呼びます。
IC パッケージ表面からセンサー位置までの距離は各製品の固有の数値のため、製品ごとのご説明では、パッケージエアギャップのことをギャップと呼ぶこともあります。
回転角度センサー AK7455 の技術資料である磁石選定ガイドラインでは、センサーエアギャップをギャップと定義しています。
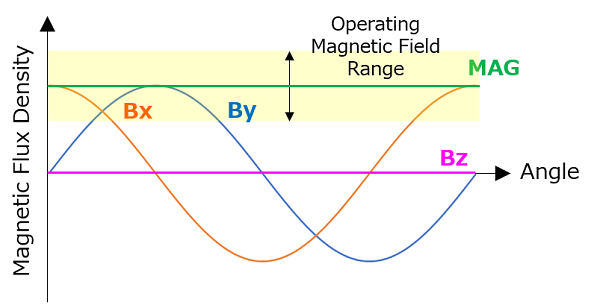
AKM の回転角センサー AK7455 が検出する磁場成分です。
パッケージ表面に対して水平方向に入る磁場 (横磁場) で、この X 軸方向の磁場成分を Bx、Y 軸方向の磁場成分を By と定義しています。
* Shaft-End 配置で軸ずれが無い場合、Bz = 0
 磁場 (Bx, By)
磁場 (Bx, By)
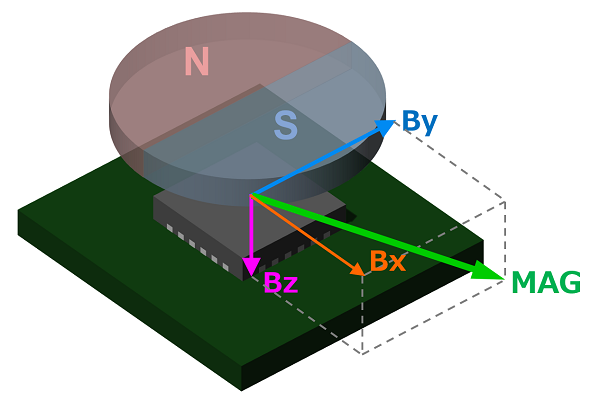
MAG 値は、Bx と By, Bz の二乗和の平方根
(MAG = √ (Bx^2+By^2+Bz^2)) で定義されます。
検出磁場範囲は角度検出に必要な磁束密度の範囲を指し、AK7455 をShaft-End 配置で使用する場合、MAG 値が30~ 70mT である必要があります。Shaft-End 配置で軸ずれがない場合、この MAG 値は一定の値を取ります。
実装公差や環境温度を考慮すると、軸ずれが無い状態で MAG 値が 50mT となるセンサー設置位置で使用することを推奨しています。
 MAG 値 (マグち) と検出磁場範囲
MAG 値 (マグち) と検出磁場範囲
Shaft-End 配置は、磁石中心とセンサ中心が回転軸上に一直線に並んだ状態が理想的です。
AKM では、このセンサ中心と回転軸の機械的な位置ずれ・位置ずれ量を、軸ずれ・軸ずれ量と呼びます。
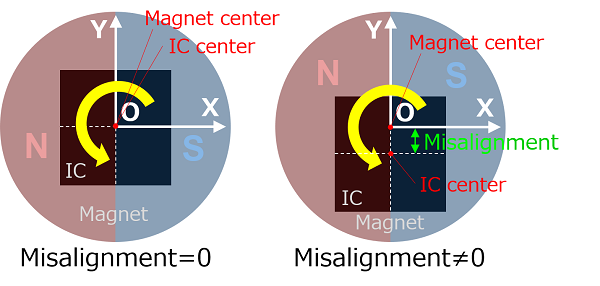 軸ずれ、軸ずれ量
軸ずれ、軸ずれ量
磁石の磁化方向には、大きく分けて径方向と面方向の 2 種類があります。
径方向着磁磁石は図のように直径方向に磁化した磁石、面方向着磁磁石は図のように直径方向と垂直な方向 (面方向) に磁化した磁石を指します。
IC パッケージ表面に水平に印加される磁場 (横磁場) を検出する AKM の回転角センサー IC で多く使用されるのが 2 極の径方向着磁磁石です。
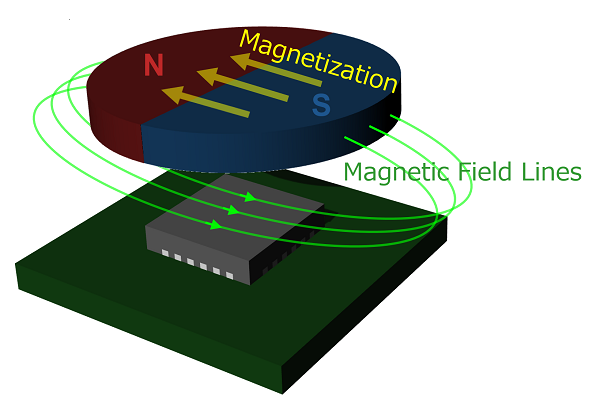 径方向着磁磁石
径方向着磁磁石
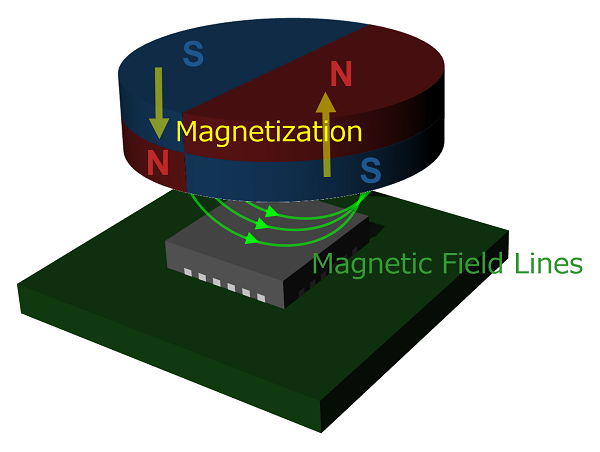 面方向着磁磁石
面方向着磁磁石
焼結磁石は、原料となる磁性体粉末をプレス成形し、高熱で焼き固めた磁石を指します。
一方で、磁性体粉末をゴムやプラスチックなどのベース材に混ぜて、プレス・押し出しなどで成形したものをボンド磁石と呼びます。こちらは焼結磁石に比べると体積当たりの磁性体粉末の量が少ない分、磁力も弱くなります。
永久磁石には様々な材料がありますが、大別すると、合金系、フェライト系、希土類サマリウム・コバルト系、希土類ネオジム系に分類できます。磁石選定ガイドラインでは、フェライト系磁石とネオジム系磁石を取り扱っています。
フェライト系磁石は安価で生産性が高いのが特長で、ネオジム系磁石はフェライト系磁石に比べて高価ですが、高い残留磁束密度を持つ高性能な磁石です。
自然界の変化を検知する素子または電子部品のことです。代表的なものには、位置を検知するスイッチ・ポテンショメーター・エンコーダー、温度を検知するサーミスタ、光を検知するフォトダイオード、圧力を検知する圧電素子などがあります。
センサーには検知する物理量によってインピーダンス (抵抗・電気容量・インダクタンス) ・電圧・電流が連続的に変化するアナログ型と、スイッチのように接点の ON/OFF やエンコーダーのように電圧の High/Low の 2 値で変化するデジタル型があります。
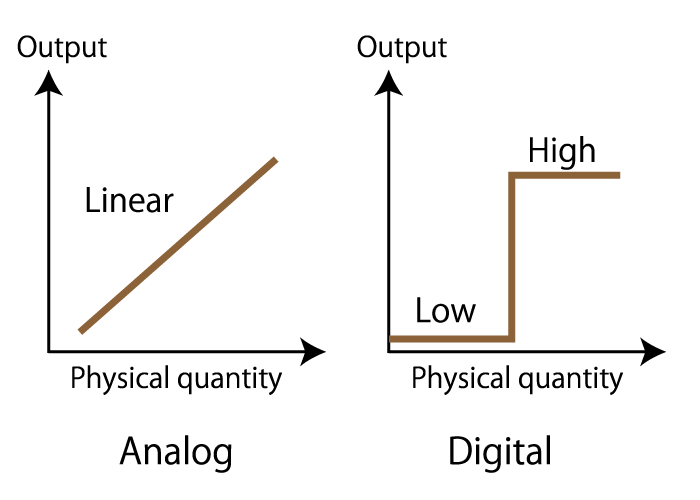 図 2. アナログ型とデジタル型
図 2. アナログ型とデジタル型
スイッチやセンサーからの信号の指令をもとに判断・処理し、アクチュエーターの動きを制御する機能を持った制御装置のことです。電気回路や電子回路で構成したコントローラーによる制御をハードウエア制御といい、コンピューターのプログラムによる制御をソフトウエア制御といいます。
工場などの生産設備で使われているPLC (Programmable Logic Controller:プログラマブル ロジック コントローラー) は内部にいろいろな電気回路や電子回路が組み込まれていて、プログラムを変えることでいろいろなシーケンス制御ができるようになっています。
シーケンス制御:一連の決まった動作を順番 (シーケンス) に行う制御のこと。
いろいろなエネルギーを回転運動や直線運動などの機械的な運動に変換する装置です。代表的なアクチュエーターには、モーターやスライダーなどがあります。これらを動力源として回転運動や直線運動をするための機構 (メカニズム) を含めたものもアクチュエーターといいます。
アクチュエーターの動力源として、油や空気の圧力エネルギーを利用する油空圧技術と、電気エネルギーを利用するモーターがあります。回転運動するモーターではエンコーダーを使って速さや回転角を制御し、機械などを精度よく迅速に動かすことに使われます。
油圧では正確な位置や速さの制御ができますが、動き出すまで時間がかかるためエンコーダーを使った制御は行われません。空気圧では位置や速さを正確に制御するのではなく前進・後退などの単純な動きを組み合わせて、工場などの自動化・省力化技術に使われます。
ステッピングモーターは回転軸に取付けられた磁石と固定されたコイルで構成されていて、コイルにパルス電流を流して磁化し回転軸の磁石を引きつけることで回転します。ステッピングモーターの回転が速くなるとトルク (モーターを回転させようとする力) が低下し、モーターはパルス速度に追従できなくなります。この現象を脱調 (だっちょう) といいます。また、モーターが回転していないとき、何らかの理由で意図せずモーターが回転してしまう現象も脱調といいます。