-
製品情報

-
アプリケーション
-
サポート
-
AKM について
#03
インクリメンタル方式とアブソリュート方式
エンコーダー 基礎知識
わたしたちがいままでに得た知識を整理してみなさんに紹介している連載の今回は第 3 話です。これからエンコーダーを勉強したい人、自分はエンコーダーを扱っていないけど社内の他部署の人がエンコーダーを扱っているので仕事内容を知りたい人、赤いモーターを通常の3倍の速さで回転させたい人・・・そんな人たちのお役に立てたら幸いです。
第 2 話ではエンコーダーのしくみの前半について紹介しました。
今回はエンコーダーのしくみの後半を紹介します。
まとめ
- エンコーダーが回転や角度の情報を表現する方法には相対角度と絶対角度の 2 種類ある。
- 相対角度を表現する方法はインクリメンタル方式、絶対角度を表現する方法はアブソリュート方式と疑似アブソリュート方式がある。
- 相対角度と絶対角度はどちらにもメリットとデメリットがあるため、「検知する目的」に合わせて使い分ける。
3-1. 回転や角度の情報はどんな電気信号で表現されるの?
 図 1. 回転運動が回転情報に変換されるまでのプロセス
図 1. 回転運動が回転情報に変換されるまでのプロセス
第 2 話では、回転や角度の情報は 4 種類に大別されると説明しました。エンコーダーが角度の情報を表現する方法には相対角度と絶対角度の 2 種類あり、それぞれの表現方法によってエンコーダーから出力される電気信号の形式が異なります。
- 相対角度:動く前と動いた後で、どれくらいの角度を移動したか?
- 絶対角度:原点から今、何度の位置にいるか?
相対角度を表現するインクリメンタル方式
ある位置から次の位置までの移動量を検知するタイプのエンコーダーを相対角度検知タイプと言います。地図に例えると、『この道を 100m 進んで、右に 30m 進んだらコンビニがあるよ』と説明するのが相対角度検知タイプです。相対角度検知タイプのエンコーダーは、回転動作に応じてデジタルのパルス信号を出力します。このような出力方式はインクリメンタル方式と呼ばれます。
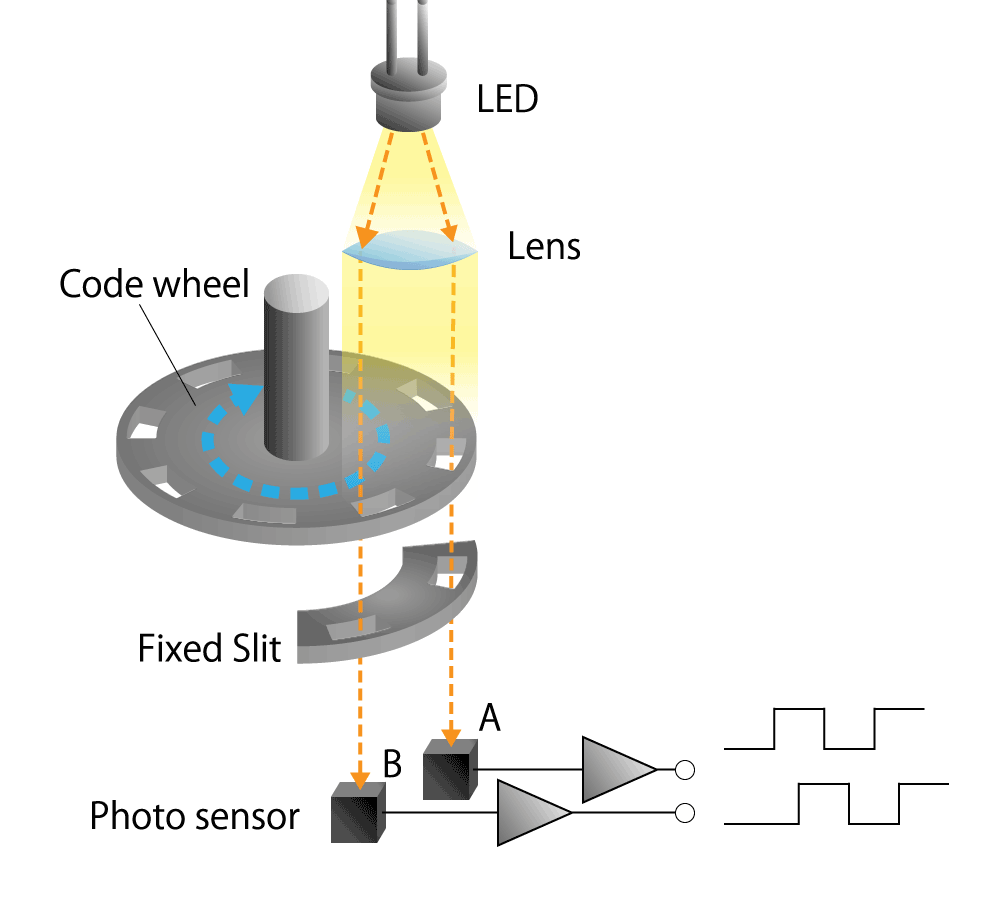
第 2 話でお話しした光学式エンコーダーを例にあげて説明します。光学式エンコーダーは放射方向にスリット (穴) をあけた円盤が回転することでパルスを発生します。パルスの数を数えると円盤の角度変化 (移動量) がわかります。4 つのスリットが1列に並んでいる場合、1 回転あたりのパルス数は 4 つなので、パルス 1 つで 360°/4=90° 回転したことがわかります。スリットの数を 2 倍に増やし 8 つにすると、パルス 1 つで 360°/8=45° 回転です。スリット数、すなわち 1 回転あたりのパルス数が多ければ、角度変化の分解能が高くなり、移動量を細かく表現することができるようになります。
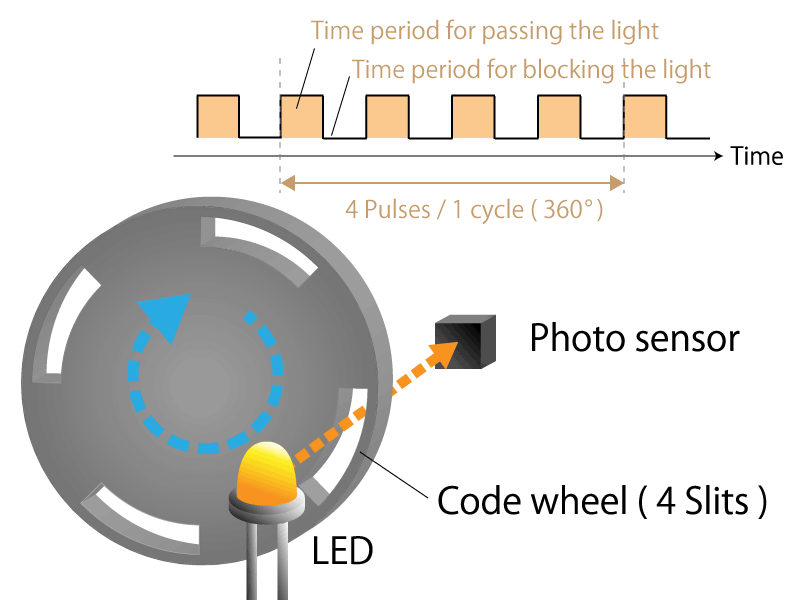 図 2a. 4スリットのインクリメンタル方式ロータリーエンコーダー
図 2a. 4スリットのインクリメンタル方式ロータリーエンコーダー
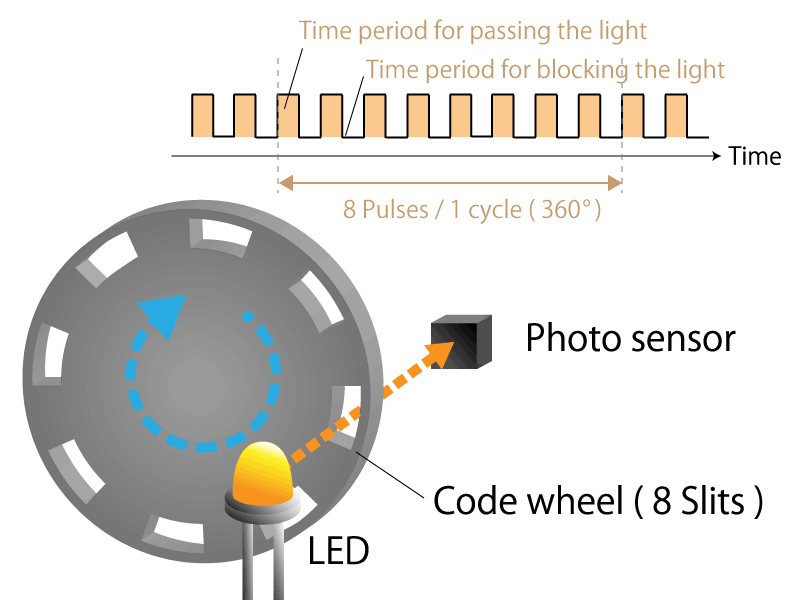 図 2b. 8スリットのインクリメンタル方式ロータリーエンコーダー
図 2b. 8スリットのインクリメンタル方式ロータリーエンコーダー
しかし、この方法だと回転方向が変わったことを認識することができません。そこで、4 分の1周期だけ位相がずれた2つのパルスを発生させます。この 2 つのパルスは一般的に A 相、B 相と呼ばれます。A 相と B 相のどちらのパルスの立ち上がりが先かによって回転方向がわかるようになっています。逆回転時のパルス数を減算することで、回転方向が変化しても回転量が正確にわかります。
 図 3a. 時計回りのA相、B相の波形
図 3a. 時計回りのA相、B相の波形
 図 3b. 反時計回りのA相、B相の波形
図 3b. 反時計回りのA相、B相の波形
絶対角度を表現するアブソリュート方式
“原点からどれくらい離れた位置にいるか”を検知するタイプのエンコーダーを絶対角度検知タイプと言います。地図に例えると、『東京都千代田区○○町○番地にコンビニがあるよ』と教えるのが絶対角度検知タイプです。絶対角度検知タイプのエンコーダーは、マイコンからの命令に応じて現在の絶対角度をデジタルのシリアルコードまたはアナログ電圧で出力します。このような出力方式はアブソリュート方式と呼ばれます。
ここでも光学式エンコーダーを使って説明します。インクリメンタル方式ではスリットが1列しかありませんが、アブソリュート方式では複数列あります。例えばスリットが4列ある場合、バイナリーコード(2 進数)で0000から1111まで16通りの角度の絶対位置がわかります。スリットを5列にすると、00000から11111まで32通りになります。スリットの列を2倍に増やし8つにすると、00000000から11111111まで 256 通りの角度の絶対位置がわかります。スリットの列が増えると角度変化の分解能が高くなり、移動量を細かく表現することができるようになります。
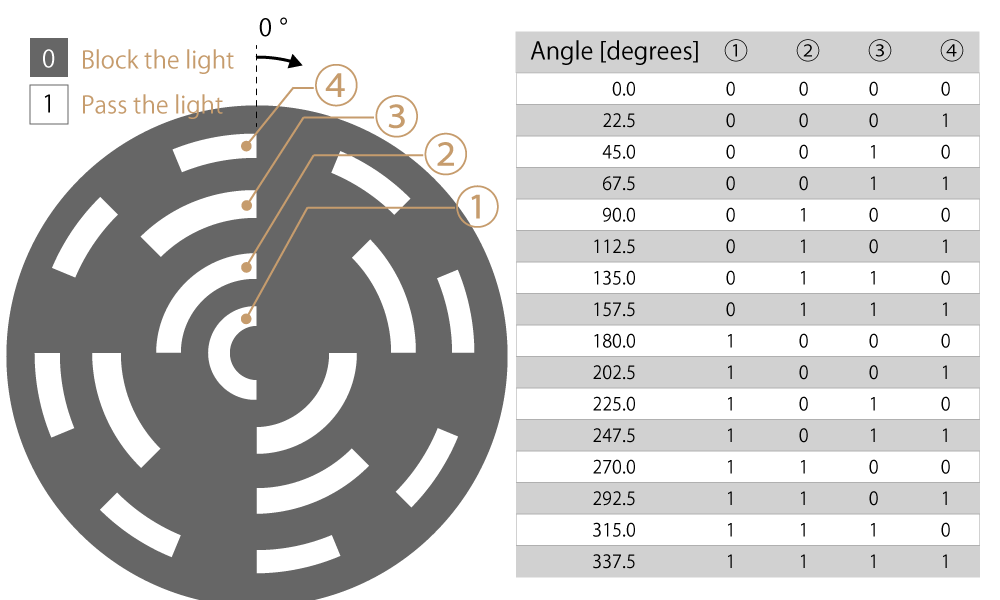 図 4a. スリット 4 列のアブソリュート方式ロータリーエンコーダー
図 4a. スリット 4 列のアブソリュート方式ロータリーエンコーダー
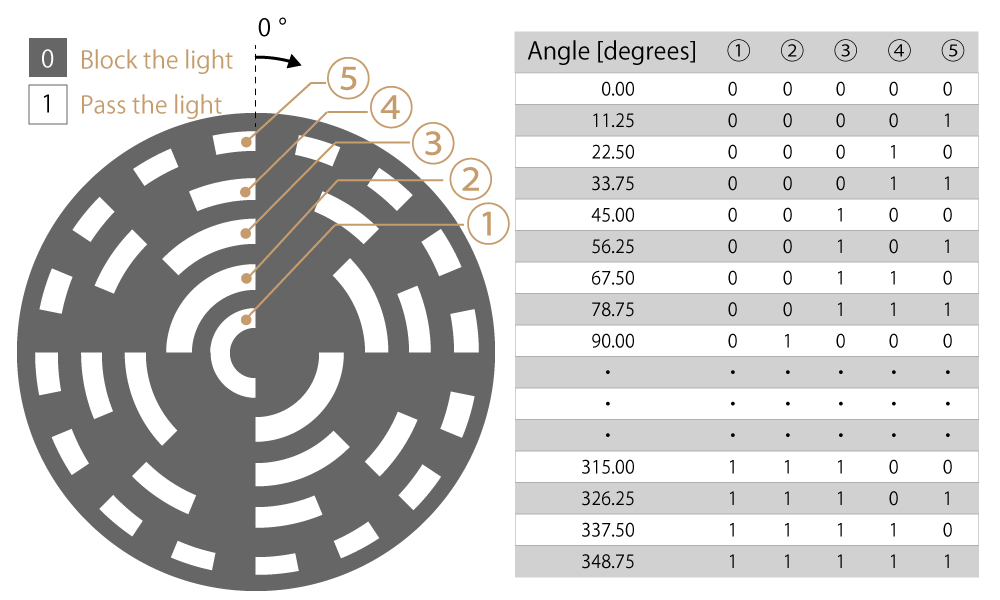 図 4b. スリット 5 列のアブソリュート方式ロータリーエンコーダー
図 4b. スリット 5 列のアブソリュート方式ロータリーエンコーダー
パルス信号で絶対角度を表現する疑似アブソリュート方式
インクリメンタル方式を応用して絶対角度を表すこともできます。インクリメンタル方式の A 相、B 相パルスを取り出すためのスリット列とは別に、スリットを 1 つだけ追加し、1 回転に 1 回だけパルスを発生させます。このパルスを Z 相 (Zero の意味) と呼びます。Z 相パルスを原点とし、A 相、B 相パルスで原点からの回転量を検知して絶対角度を表現する方式を疑似アブソリュート方式と呼びます。
 図 5a. 時計回りのA 相、B 相、Z 相の波形
図 5a. 時計回りのA 相、B 相、Z 相の波形
 図 5b. 反時計回りのA 相、B 相、Z 相の波形
図 5b. 反時計回りのA 相、B 相、Z 相の波形
3-2. 相対角度と絶対角度のメリット・デメリット
相対角度と絶対角度、どちらにもメリットとデメリットがあります。
相対角度を表現するインクリメンタル方式はスリットが 1 列 (疑似アブソリュートの場合は 2 列) しかないためコードホイールを安価に製造できますが、絶対角度を表現するアブソリュート方式の場合、スリットが複数列になるため角度変化の分解能を高めようとするとコードホイールの製造コストが高価になります。
一方、モーターの回転を止め、電源を落としたあとに再度起動した場合、アブソリュート方式であれば、再起動時の位置を検知できますが、インクリメンタル方式と疑似アブソリュート方式の場合は、積算された角度データが消去されているため再起動時の位置を検知出来ません。
さらに、アブソリュート方式では信号の伝送方式によるメリットとデメリットがあります。
アブソリュート方式ではバイナリーコードをデジタル信号として出力する方法と、バイナリーコードをアナログ電圧に変換して出力する方法があります。さらに、デジタル信号には複数本のスリットから得られたバイナリーコードを複数本の信号線でそのまま出力するパラレル出力と、パラレル出力の複数本の信号線を時間とともに 1 本ずつ順番に切り替えながら 1 本の信号線で出力するシリアル出力があります。
 図 6. 角度情報とデジタル出力信号のバイナリコードとアナログ出力電圧の関係
図 6. 角度情報とデジタル出力信号のバイナリコードとアナログ出力電圧の関係
 図 7. パラレル出力信号とシリアル変換された出力信号
図 7. パラレル出力信号とシリアル変換された出力信号
デジタル信号は伝送時のノイズに強いというメリットがありますが、パラレル出力では信号線が多くなるというデメリットがあり、シリアル出力では通信に時間がかかるため、モーターが回転していると、出力されたコードと現在位置にずれが生じる場合があります。アナログ信号は時間遅れのない信号線が1本ですむというメリットがありますが伝送時のノイズに弱くなるというデメリットがあります。
このように、相対角度と絶対角度には、メリット・デメリットがありますので、使用の用途に合わせて検知タイプを選定するようにしてください。たとえば、モーターのシャフトやロボットアームの回転角度検出は絶対角度が必要ですし、モーターのローター磁極検知は相対角度が必要になるでしょう。どんな位置が知りたいのか、どの角度が重要なのか、「検知する目的」に合わせて使い分けてください。
まとめ
- エンコーダーが回転や角度の情報を表現する方法には相対角度と絶対角度の 2 種類ある。
- 相対角度を表現する方法はインクリメンタル方式、絶対角度を表現する方法はアブソリュート方式と疑似アブソリュート方式がある。
- 相対角度と絶対角度はどちらにもメリットとデメリットがあるため、「検知する目的」に合わせて使い分ける。
いかがでしたか?
今回はインクリメンタル方式とアブソリュート方式について紹介しました。回転や角度の情報が相対角度や絶対角度で表現されることをご理解いただけたと思います。
次回は光学式エンコーダーの動作原理と特長について解説します。それでは、また会いましょう。