-
製品情報

-
アプリケーション
-
サポート
-
AKM について
モーターエラー計算ツール
電流センサー
サーボモーターでは、モーターに流れる電流量をフィードバック制御してトルク量を決めているため、電流検出部の誤差はトルク量の誤差に直結します。このトルク量の誤差は、工作機械の加工精度などにも影響を及ぼすため、電流検出部の誤差はサーボモーターの設計において非常に重要なパラメータと言えます。
「モーター Error 計算ツール」は、サーボモーターのトルク誤差と電流センサの関係を簡易計算するためのツールです。お使いのサーボモーターの情報及び電流検出に関する情報をご入力いただき、また比較する弊社の電流センサーを選択いただくと、電流検出部を置き換えた際に、トルク精度がどのように変化するかを見積もることができます。
*注意
本ツールは、あくまで電流検出部による影響を簡易に比較していただくことを目的としています。そのため、モーターの情報やフィードバックループは非常にシンプルで、理想的なものとしています。実際の装置における誤差量とは異なってきますので、ご理解ください。
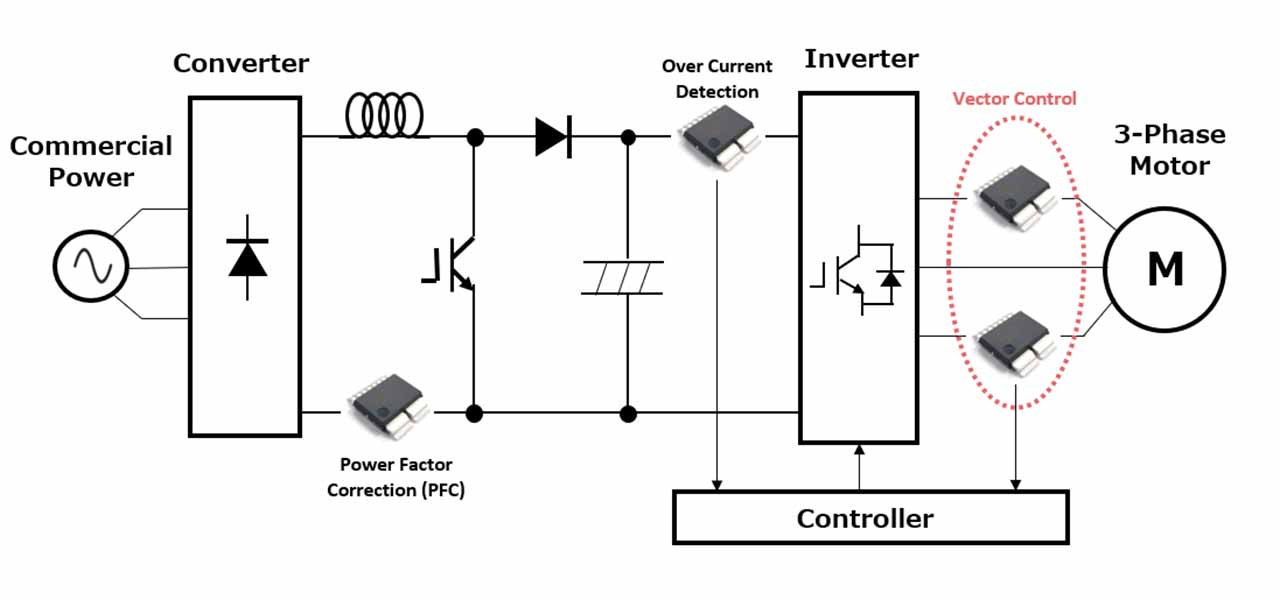 図 1 インバーター回路のブロック図
図 1 インバーター回路のブロック図
ツールの使い方
このツールでは、2Stepで比較計算が可能です。
*本ツールでは、d 軸電流 (id)=0 の時のマグネットトルクを計算しています。
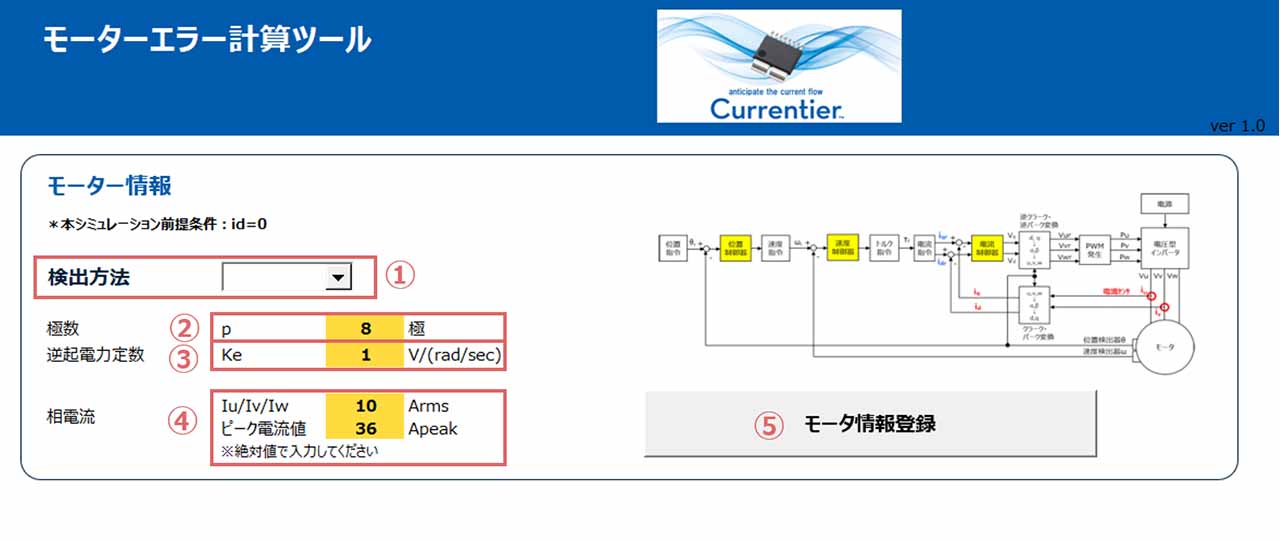 図 2 モーター情報入力画面
図 2 モーター情報入力画面
[Step1] モーター情報の入力
(2) ご使用の磁石極数を入力してください。
(3) 逆起電力定数を入力してください。
(4) 相電流に関連する項目 ( 実効電流および検出したい電流の最大値 ) を入力してください。
(5) モーター情報登録ボタンを押してください。
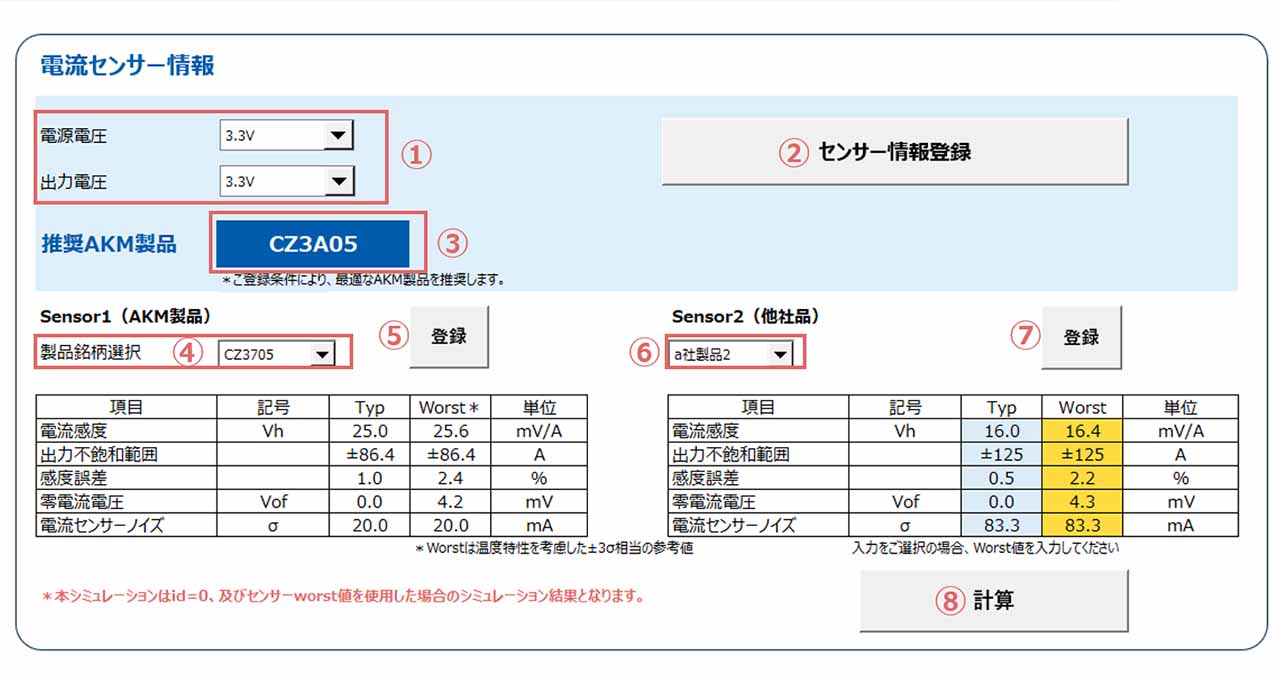 図 3 電流センサー情報入力画面
図 3 電流センサー情報入力画面
【Step2】電流センサー情報の入力
(1) 電流センサーに供給される電源電圧 (5V/3.3V) 、および出力電圧 (5V/3.3V) を選択し、(2) センサー情報登録ボタンを押してください。
(3) 電源電圧、出力電圧および [Step 1・(4)] で入力した電流の最大値から、推奨の電流センサーが表示されます。
(4) Sensor 1 (AKM 製品銘柄 ) を選択し、登録ボタンを押してください。
(5) お選びいただいた AKM 製品の特性が表示されます。
*「製品未検討だが、まずは本ツールを試したい」という方は、(3)で推奨した電流センサを選択してください。
*より詳細に製品検討されたい方は製品から探すからお探しください。
*表示される Typ 値は室温における保証範囲です。
*表示される Worst 値は温度特性を考慮した ±3σ 相当の参考値です。
(6) Sensor2 (比較する電流センサー情報) をご入力ください。
他社品を選択する場合は、"a 社製品例 1,2" および "b 社製品例 1,2" から選択し、登録ボタンを押してください。お使いのサーボモーターの情報を直接入力される場合は、"入力" を選択し、登録ボタンを押してください。
(7) "a 社製品例 1,2" および "b 社製品例 1,2"を選択した場合は、表に他社品の特性が表示されます。"入力" を選択した場合、表が空欄になりますので、黄色い欄にお使いのサーボモーターの情報をご記入ください。
*再度登録ボタンを押すと、入力内容がリセットされます。
*他社製品例は、コア付電流センサー、コアレス電流センサーで一般的な仕様値としています。
(8) 計算ボタンを押してください。
シミュレーション結果の確認
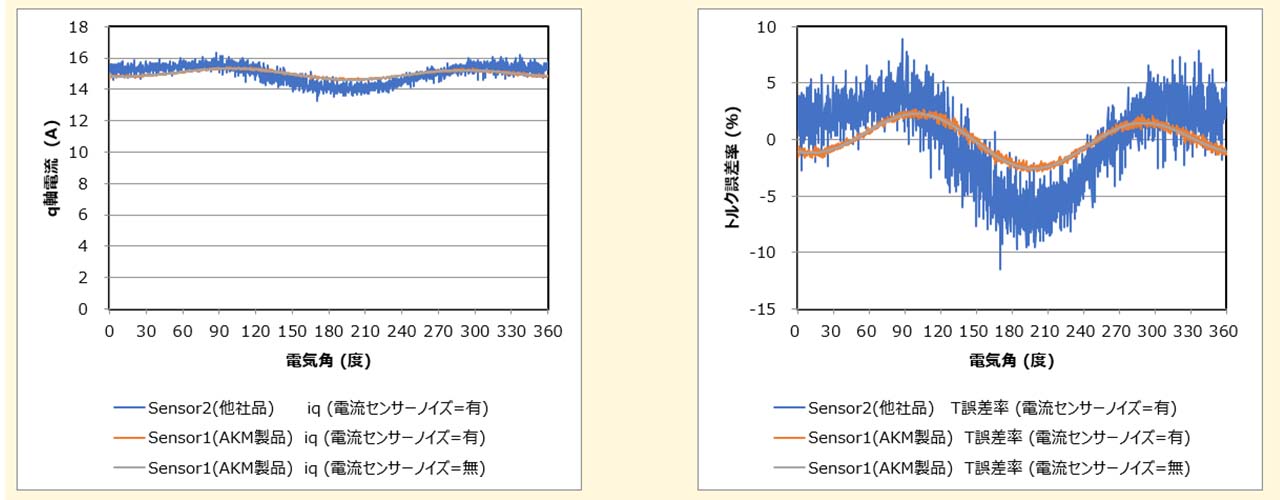 図 4 シミュレーション計算結果
図 4 シミュレーション計算結果
*本ツールは電流センサーの温度特性まで考慮したワーストケースを想定しております。
左図 横軸 : 電気角 縦軸 : q軸電流
- Sensor2 (他社電流センサー) iq (電流センサーノイズ=有)
- Sensor1 (AKM電流センサー) iq (電流センサーノイズ=有)
- Sensor1 (AKM電流センサー) iq (電流センサーノイズ=無)
右図 横軸 : 電気角 縦軸 : トルク誤差率
- Sensor2 (他社電流センサー) T誤差率 (電流センサーノイズ=有)
- Sensor1 (AKM電流センサー) T誤差率 (電流センサーノイズ=有)
- Sensor1 (AKM電流センサー) T誤差率 (電流センサーノイズ=無)
1は他社の電流センサーの感度誤差、零電流電圧誤差、ノイズを含めた結果です。
2は3にノイズの影響を含めた結果です。
3はAKMの電流センサーの感度誤差、零電流電圧誤差のみを含めた場合の計算結果です。
AKM の電流センサーはノイズが小さいため、ノイズによる影響が小さいことがお分かりいただけます。一方、他社の電流センサーはノイズが大きいため、誤差が大きくなってしまいます。
*本サービスのご利用の前に、必ず ご利用条件 をお読みください。
トルク誤差と電流センサーの関係とは
モータードライブシステムは、内側から順に、電流を制御する電流制御系、速度を制御する速度制御系、位置を制御する位置制御系からなる、制御ループで構成されています。車のように速度を制御するだけの場合は速度制御系までで構成され、ロボットのように目標位置まで移動させるような場合は位置制御系までの構成が必要となります。
電流制御系はモーター制御システムの最も内側に位置するため、外側の制御系にも大きな影響を及ぼし、そのため最も高速・高精度に設計されることが重要です。
電流制御系は加速度に相当するトルクを制御します。トルクはモーターに流れる電流量に比例するため、モーターにかかる負荷に比例して電流量を調整します。
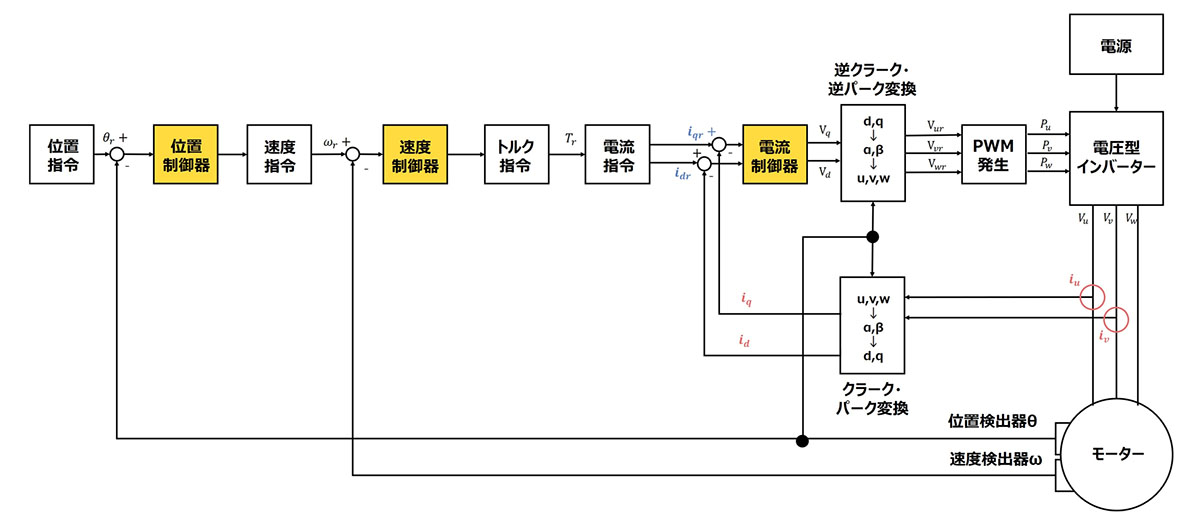 図 5 モータードライブシステム構成図
図 5 モータードライブシステム構成図
id と iq は それぞれ ベクトル制御で利用される d 軸電流、q 軸電流です。
各相に流れる電流 iu、iv、iw は、
iu = Iusinθα
iv = Iusin(θα - 2π/3)
iw = Iwsinθα + 2π/3)
と表せます。
電流センサーの感度誤差と零電流電圧誤差がトルク (T) の精度に与える影響は以下の式で表せます。
T = iu(K+1) + iv + iw + ioff + inoise
iu、iv、iw : 各相に流れる電流電流, K : 電流センサーの感度誤差, ioff : 電流センサーの零電流電圧誤差, inoise : 電流センサーのノイズ
*本ツールでは、d軸電流 (id)=0 の時のマグネットトルクを計算しています。
上記の式より、電流センサーの感度誤差、零電流電圧誤差、ノイズのすべてがモーターのトルク誤差に影響することがわかります。
特に、電流センサーのノイズによる影響が大きいため、ノイズ が小さい電流センサーを選ぶことが重要です。
弊社の電流センサー ”Currentier” は、非常に零電流電圧誤差が小さいため、モーターの相電流制御に適しています。